第6课:3号位及任务:火炬传递
一、了解任务:火炬传递
场地某个任务区上固定有一名火炬手模型,手里拿着火炬。
机器人将火炬从火炬手上面取下,火炬与火炬手没有任何接触得 50 分。
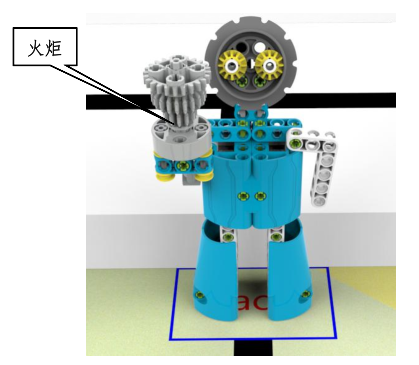
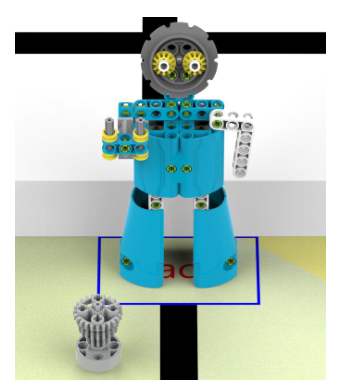
任务完成状态:
二、手臂搭建:
(等待拍摄图片)
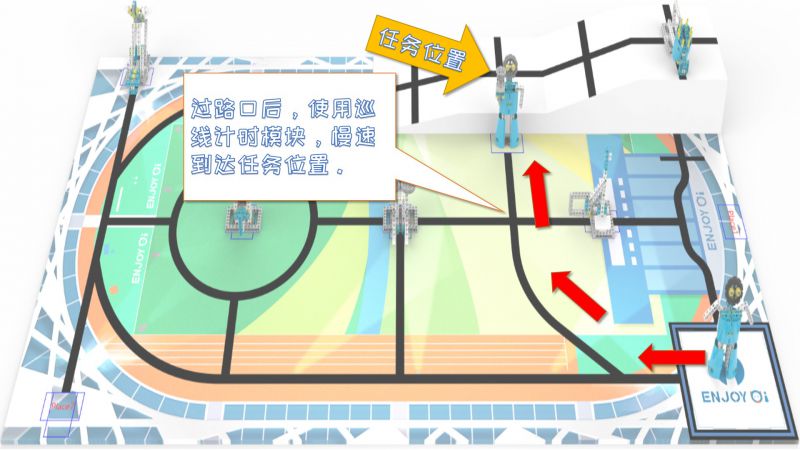
三、路线规划:
四、程序编写:
1. 程序初始化:默认设置即可。
2. 出基地:2个启动电机出基地,第1个启动电机碰到基地黑线,第2个启动电机使机器人脱离黑线。
3. 到任务区:
路口巡线:设置右侧路口,并冲出路口时间为0.1秒。
转弯:右转,左30,右-30。
路口巡线:设置十字路口,并冲出路口时间为0.1秒。
巡线计时:20速度,时间约0.3秒(通过测试进行修改)。
4. 完成任务:
升起手臂(取下火炬):添加“动作”中的“电机”模块,设置电机D功率为20,时间为:1秒。
添加动作中的电机全停模块。
5. 回到基地:
后退:添加启动电机,设置速度为 左-20,右-20,时间约为0.3秒。
两次转弯:转弯必须从左侧转弯,不然会触碰到右侧任务模型。转弯需要转过十字路口,所以需要转弯两次。即添加两个转弯模块,并设置左-30,右30。
路口巡线:添加巡线路口,并设置路口为左侧路口,冲过路口时间为0.5秒。
五、实践操作
1. 将程序名设置为3,并下载到机器人控制器中。
2. 在场地上操作机器人,并根据机器人完在情况,修改程序。