冰雪运动会方案升级版
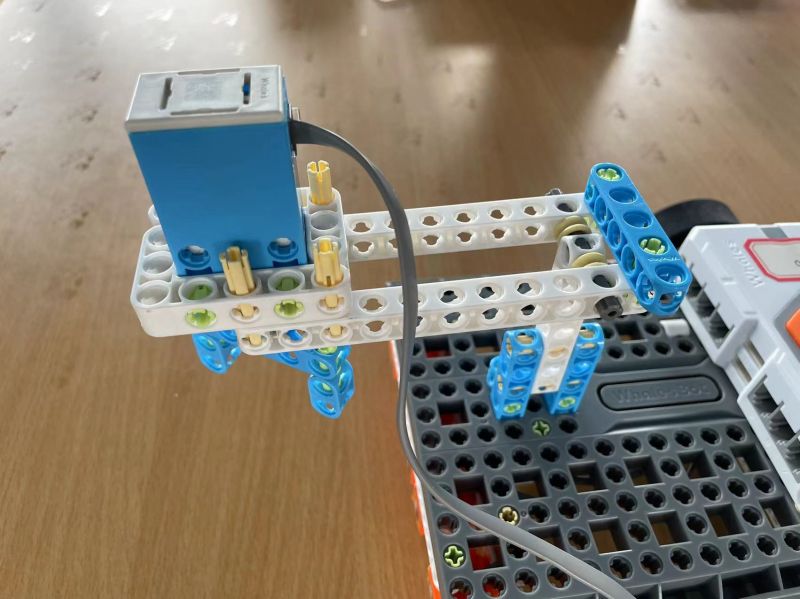
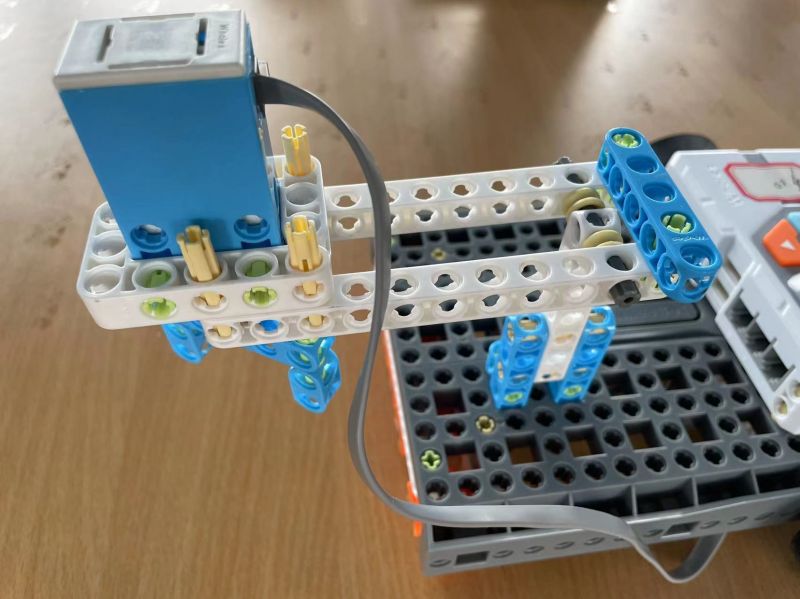
一、机器人灰度传感器改装:
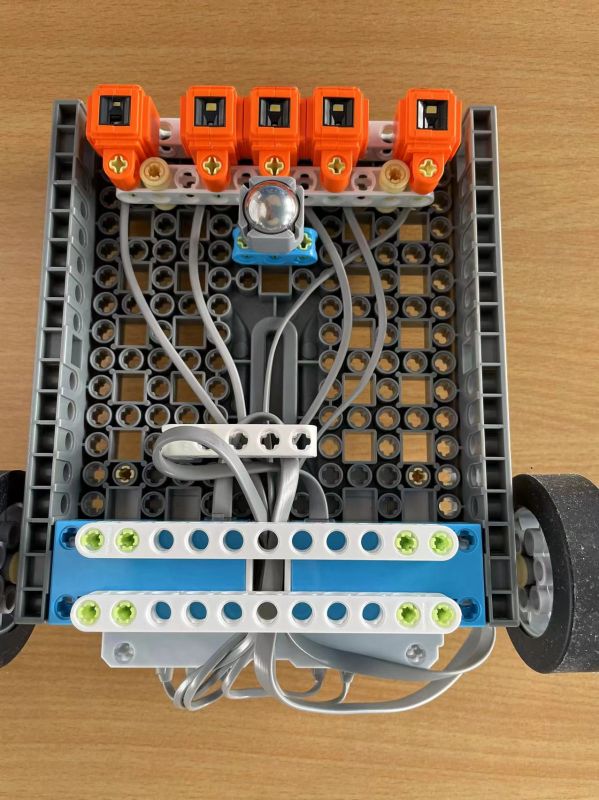
灰度传感器安装到与机器人前面对齐,万向轮安装在传感器的后面。这样改装,是为了让机器人在做平台任务的时候,能够准确定位。
二、各任务手臂及安装位置:
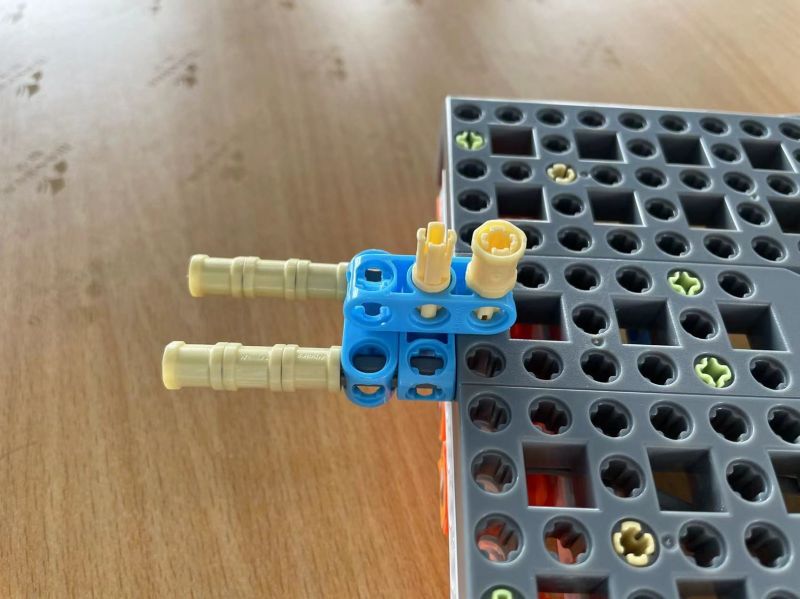
1. 冰壶任务:
安装在机器人正前方,此手臂可以与最大的手臂合装,可以实现同时完成多个任务。完成冰壶任务大概70%的概率得70分,30%得50分。
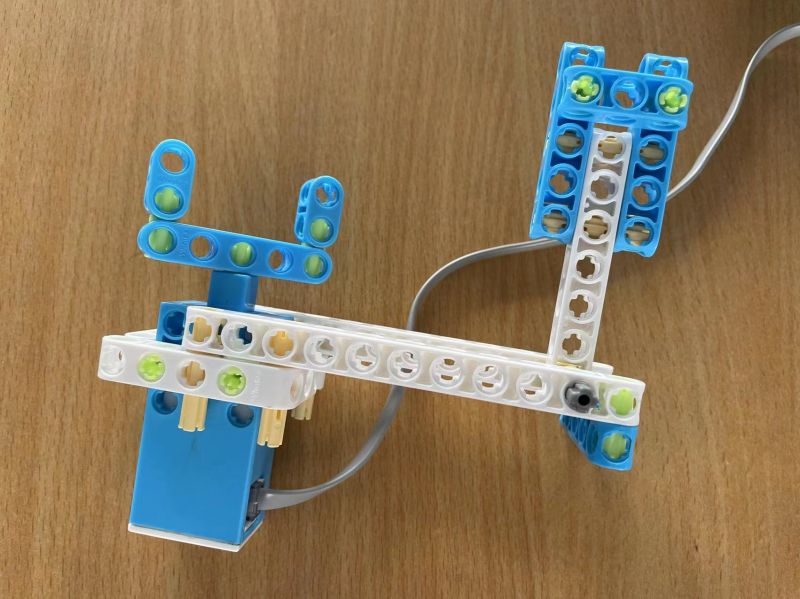
2. 冰球、有舵雪橇、花样滑冰任务手臂:
此3个任务使用同一个手臂,可以实现任务串联。冰球任务成功率较高、有舵雪橇任务成功率不太高,花样滑冰任务成功率较低,容易打滑(特别注意)。
此手臂有待改进。
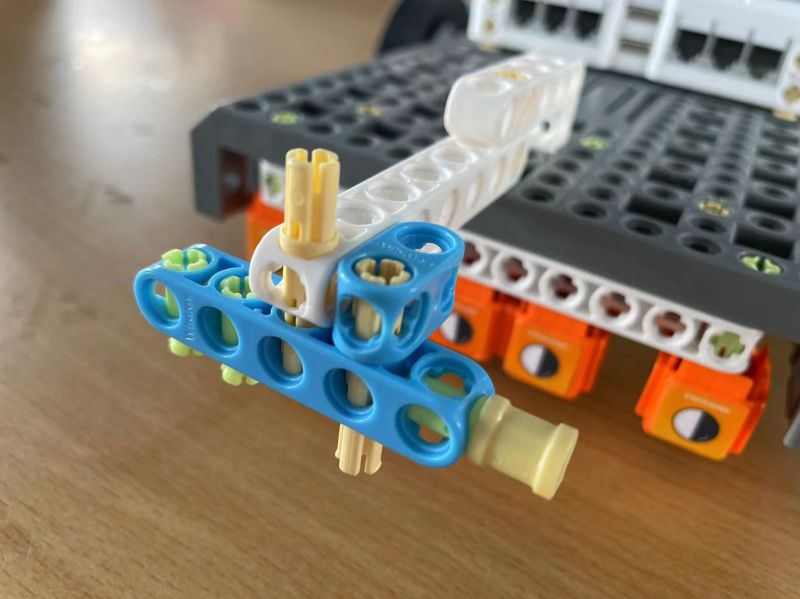
3. 短道速滑手臂:
短道速滑手臂为单独一个手臂,此任务单独完成,不与其他任务串联。此任务成功率较高,但转动时依然有打滑的可能。
如果短道速滑从左右完成,手臂要安装位置在正中间,前面空1个方格(整体空3行)。
如果短道速滑从右边完成,手臂不安装在正中间,要安装在左边的中间两方格中。
4. 高山滑雪、越野滑雪、跳台滑雪任务手臂:
此手臂可同时完成3个任务。
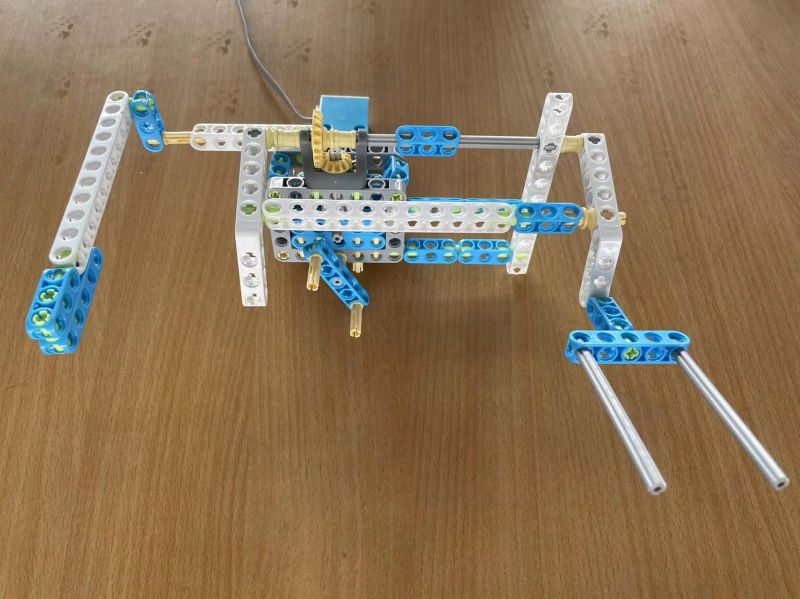
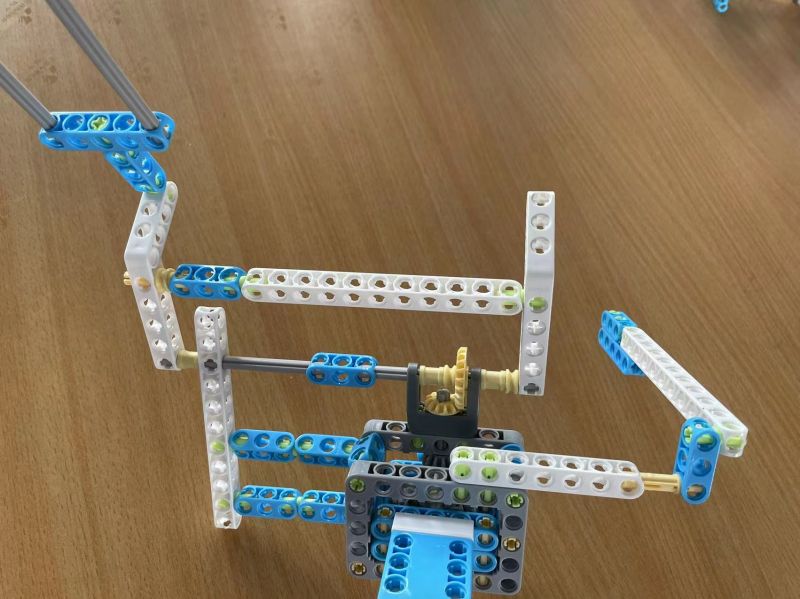

手臂安装在机器人前端空1行处,空的1行,可以安装冰壶任务手臂,实现4个任务同时完成。