第八课:八号线巡线任务(LOCATION-8)
本节课将要学习八号位置的巡线任务(LOCATION-8),这个位置与7号位置相近,巡线路程差不多,可以借鉴7号线巡线的写法。八号位置并没有默认任务,所以本次并不包括任务模块的编程。
一、了解八号线巡线任务

机器人从基地出发,向上前进到第一个路口时向左转弯,再前进到中间路口时向右转弯,然后向上到达第三个路口,然后向右转弯,再前进一点到达位置8(LOCATION-8)。
机器人向后退一些,然后转向基地,再前进可直接到达基地。
二、巡线编程实践
1. 打开VJC4.2编程软件,将程序名称修改成8-代号,8代表8号位置,代号是你的专属代号。
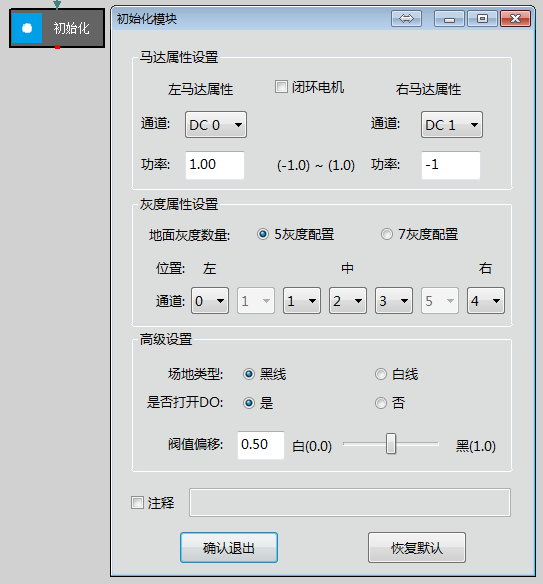
2. 程序初始化:去掉闭环电机,设置右马达属性的功率为-1,再设置传感器为5灰度配置,并设置顺序为:0-1-2-3-4。
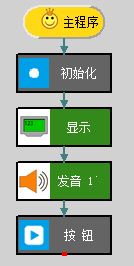
3. 添加显示模块,设置在第三行显示:8-x,代表8线任务。
4. 添加发音模块,设置一个短发音,表示机器人已经准备就绪。
5. 添加按钮模块,使用按钮控制机器人出发。
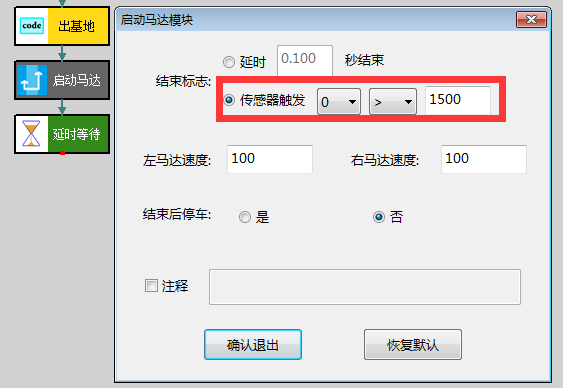
6. 添加启动马达,设置左右马达速度为100,并设置0号传感器大于1500为结束标志。
7. 添加延时模块,设置延时0.2秒,使机器人冲出基地。
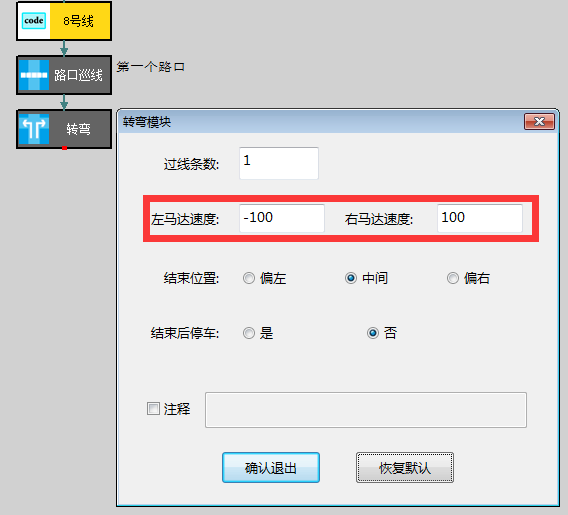
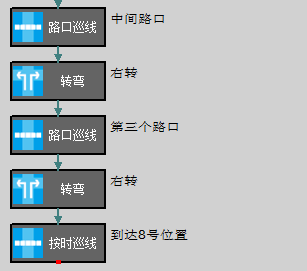
8. 添加路口巡线,设置路口为左侧路口,并设置冲过路口时间为0.2秒。
9. 添加转弯模块,设置左马达速度为-100,右马达速度为100,使机器人向左转弯。
10. 添加路口巡线模块,设置路口为右侧路口,冲过路口时间为0.2秒。
11. 再添加转弯模块,设置左马达速度为100,右马达速度为-100,使机器人向右转弯。
12. 继续添加路口巡线模块,设置冲过路口时间为0.2秒。
13. 再添加转弯模块,调协左马达速度为100,右马达速度为-100,使机器人向右转弯,面向任务位置。
14. 再添加按时巡线模块,设置巡线速度为70,时间约为1.2秒,使机器人跑到8号位置。
15. 添加一个发音模块,并设置一个短发音,表示机器人已经到达任务区域。

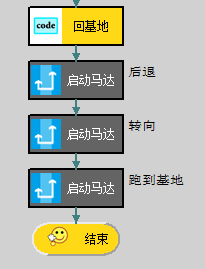
16. 添加一个启动马达,设置左右马达速度为-100,延时0.3秒,使机器人后退。
17. 添加一个启动马达,设置左马达速度为100,右马达速度为-100,延时0.5秒左右,使机器人面向基地。
18. 添加一个启动马达,设置左右马达速度都为100,延时约2秒,并在结束后停车,使机器人跑到基地。
三、操作实践
1. 将编写的机器人程序下载到控制器中;
2. 操作机器人巡线,反复测试并修改程序,使机器人巡线成功率达到很高的水平。
四、问题延伸
1. 机器人巡线回基地和不巡线回基地各有什么优点、缺点?