导航切换
首页
动态
微课
教学
作品
社区
登录
注册
童老师 ( 主页 )
保密
城西校区
已发布
468
篇文章
级别:
砖家
最后登录:
1个月前
积分:
4270
乐器:埙
童老师
•
8年前
作品
( 阅读:689 )
乐器:埙
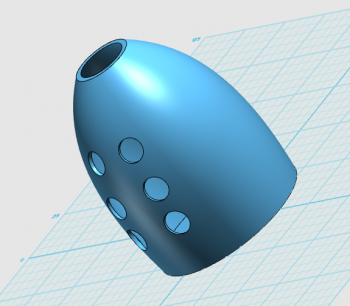
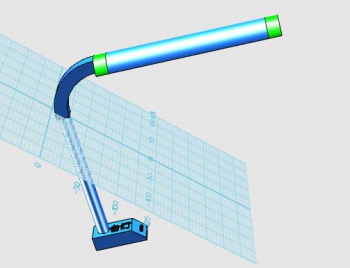
第三课:设计《小台灯》
童老师
•
8年前
教学
( 阅读:2623 )
这节课,我们将要学习台灯的设计,主要用到圆柱折弯、草图绘制等功能。一、设计台灯支架:1. 在网格中心绘制一个正方体,长16、宽16、高80.2. 使用圆柱折弯工具,设置折弯角度为90.3. 选
3D打印小狮子制作原理
童老师
•
8年前
社区
( 阅读:1280 )
3D打印原理是层层堆积,当打到悬空部位时加支撑也能打印出来,可毛发是个难题,又细又密集,加支撑肯
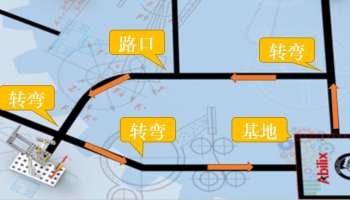
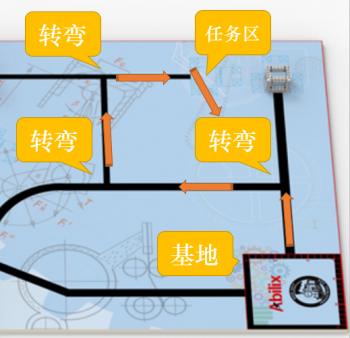
第十课:巡线挑战赛
童老师
•
8年前
教学
( 阅读:1931 )
本节课,将通过之前所学的巡线知识,完成如下巡线任务:一、任务介绍:机器人从基地出发,经过弯道到达第一个路口,转弯后再经过第二个路口,并发音,再经过第三个路口,最后到达
第九课:循环和判断控制
童老师
•
8年前
教学
( 阅读:1743 )
本节课,将要学习程序控制模块库,这个模块库涉及编程中两个重要的模块:循环和判断。
第八课:高级巡线
童老师
•
8年前
教学
( 阅读:2669 )
本节课,将要学习机器人高级巡线模块库中的高级巡线模块。一、机器人行走路线:机器人出基地后,遇到第一个路口向左转弯,经过一个路口,再到第二个路口向左转弯,再经过一条小弯
第七课:转弯
童老师
•
8年前
教学
( 阅读:2789 )
本节课,将要学习巡线模块库中的转弯模块,将通过实际巡线编程,体会转弯的不同实现方式。一、机器人行走路线:从基地出发,经过第一个路口向左转弯,经过第二个路口向右转弯,经
第六课:路口巡线及按时巡线
童老师
•
8年前
教学
( 阅读:3479 )
本节课,我们将继续学习高级巡线模块中的相关功能,将主要通过路口巡线和按时巡线功能,通过编辑,让机器人跑到任务区并返回基地。一、了解机器人行走路线:从基地出发,经过路口
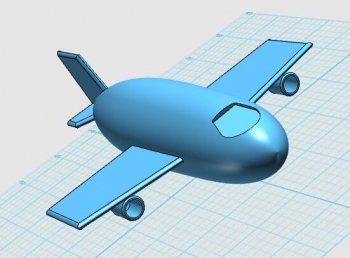
第二课:设计《飞机模型》
童老师
•
8年前
教学
( 阅读:2743 )
这节课,我们将要学习飞机模型制作,主要会用到草图绘制以及镜像功能,以及使用参考几何体的设计方式。一、绘制机身:1. 将视角调整到上,使用通过点绘制曲线功能,绘制如图的线,
使用光影魔术手处理图片
童老师
•
8年前
微课
( 阅读:3964 )
使用光影魔术手处理图片
1...
29
30
31
32
33
34
35
36
37
38
39
47