一、搭建小车
如图所示是适用于 VJC4.3 巡线模块库的巡线小车整体图
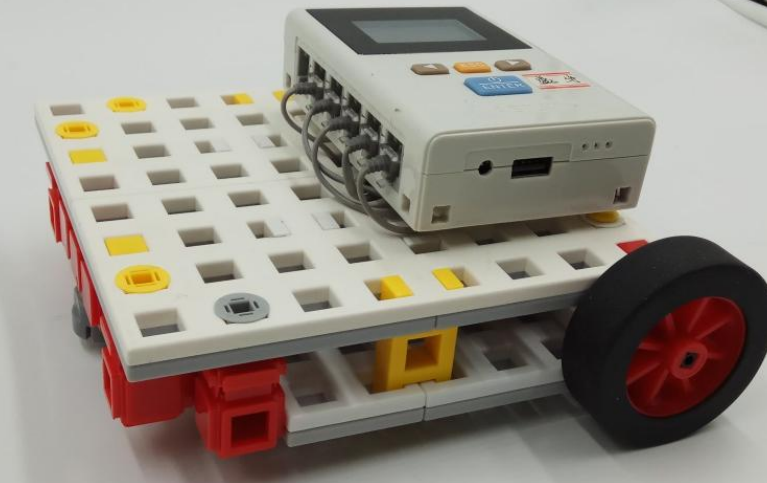
车的整体
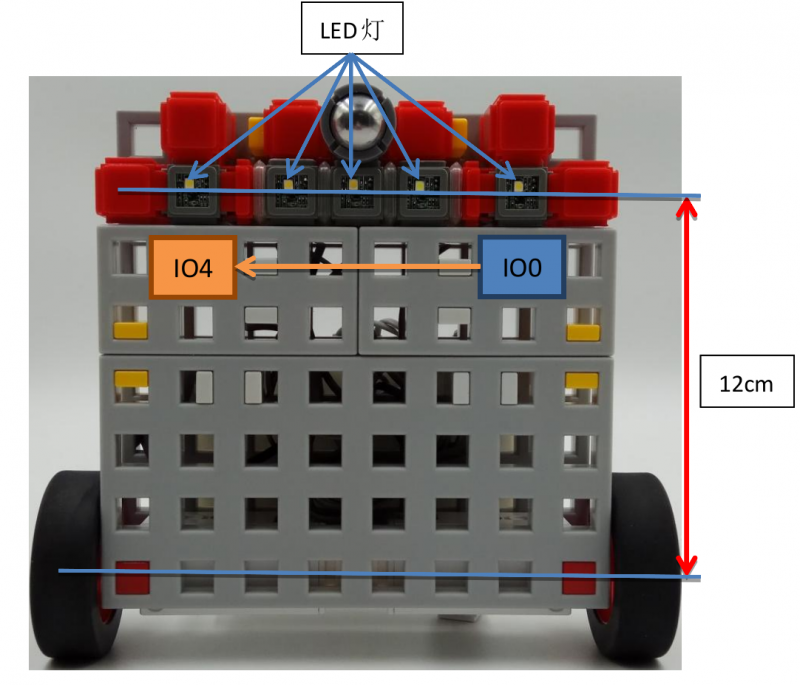
如下图所示,是巡线小车的底部图,小车底部搭建要领
1、搭建的灰度传感器底部的 LED 灯光必须全部在前。
2、中间三个灰度紧挨着搭建,最左最右两侧灰度与中间三个灰度间隔一个半高立方体。
3、五灰度的中心线距两个车轮轴中心的距离为 12cm。
4、灰度从左到右(车前进的方向)依次接控制器 IO0、IO1、IO2、IO3、IO4。
二、 巡 线 模块库
“巡线模块库”是专门针对使用地面灰度巡线小车设计的用
于巡线的模块库。使用该模块时要求地面灰度成排安装在小车的
前方,灰度数量为 5 个。下面就巡线模块库里的九个模块分别介
绍。

1 、 初始化
初始化模块是巡线机器人的配置模块,它定义了机器人上电
机的接口配置和输出功率及转向、灰度传感器的接口配置和注释。
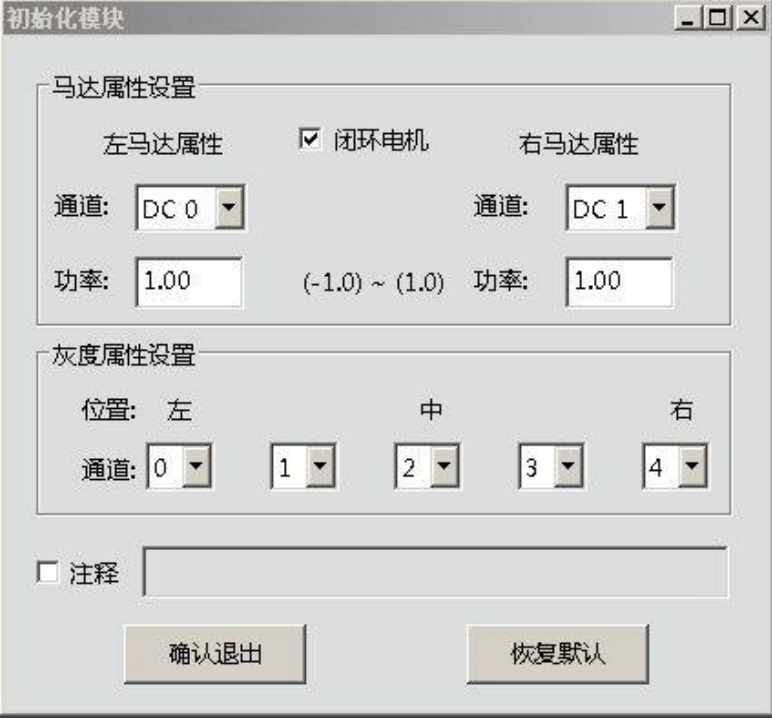
A.闭环电机:如果你使用的是速度闭环的电机需要勾选该项;如果是普通电机请勿勾选该项,
否则您的电机转动时可能会一直保持最高速度。
B.马达通道:分为 2 个,表示对应机器人的左右电机分别接在哪个 DC 口上。
C.功率:电机的实际输出速度是程序中的速度值乘以该功率值。如果某一电机正转时机器人
是后退的,可以把功率设置为负数,这样以后在设置电机速度时就无需考虑电机转向问题了。
D.(灰度)通道:定义机器人的灰度传感器分别是接在哪个 I/O 口上。
2 、 环境采集模块

该模块功用于采集地面灰度的阀值,只适用于白底黑线的场地上。在程序中,环境采集
模块前面必须有一个初始化模块。程序下载运行后,可根据控制器界面提示操作。会经历以
下几个步骤:
A.是否进行环境采集,通过左右键选择“YES”后,按“ENTER”键后进入检测界面。屏幕
会提示把灰度传感器放在黑线(BLACKLINE)上。
B. 把灰度传感器放在黑线上放在白底黑线的场地上的黑线上后,按“ENTER”键后等待,
直到屏幕会提示把灰度传感器放在白底(WHITE GROUND)上。
C. 把灰度传感器放在场地的白底上后,按“ENTER”键后等待,直到屏幕会提示检测完成
(OK)。
D. 再次按“ENTER”键后等待,屏幕会显示五灰度在黑线(BLACK)上采集到的五个值,
在白底(WHITE)上采集到的五个值,如果黑色的采集值在 3500 以上,白色的采集值在 700
以下表示灰度采集完成,否则需要重新采集。
注意:环境采集模块之前也必须要有初始化模块否则将不能采集到正确的阀值。采集到
的环境值会依次存储在 EEPROM10-19 中,其中 EEPROM10-14 中存储的是采集黑线的值,
EEPROM15-19 中存储的是白色场地采集的值。如果在程序中需要使用 EEPROM,请不要使用
EEPROM10-19;您也可以通过直接修改到EEPROM10-19来修改采集值而不用环境采集模块。
3 、 路口巡线模块
A.路口类型:单个模块中需要经过的路口是在左侧、右侧、还是在十字路口(包含 T 字
路口)。

只能用左侧路口检测到,那么勾选左侧路口;

能用最左侧或
者最右侧灰度检测到,那么路口设置为 T 字或者十字路口,

该路口不能用 T 字或者十字
路口,只能用左侧路口或者右侧路口;

只能用最右侧路口灰度检测到,那么路口
设置为右侧路口。
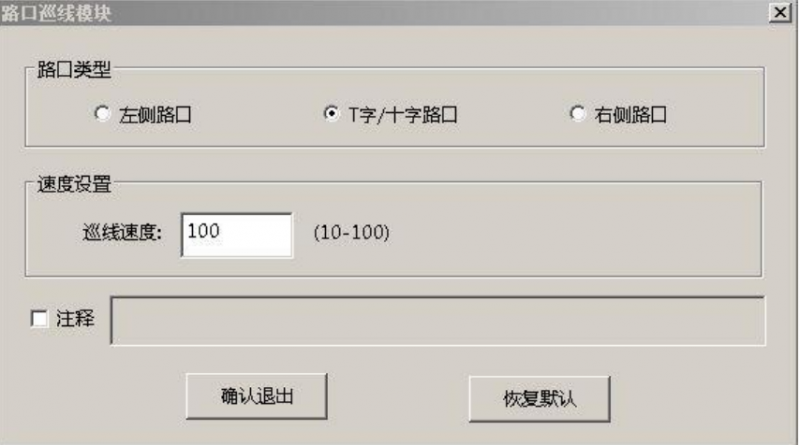
B.巡线速度:巡线速度的范围为10-100。
4 、 、 、 、 按时巡线
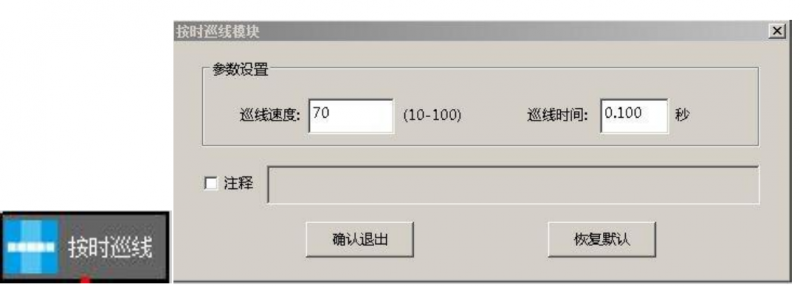
当机器人目标点没有路口或者参考点时,可以使用时间控制前进距离,但需要注意的是
前进距离由机器人速度和时间决定而影响速度的因素包含程序中的参数、电压、地面阻力等,
有些是不可控的所以做不到精确控制。
5 、 转弯 (自定义)
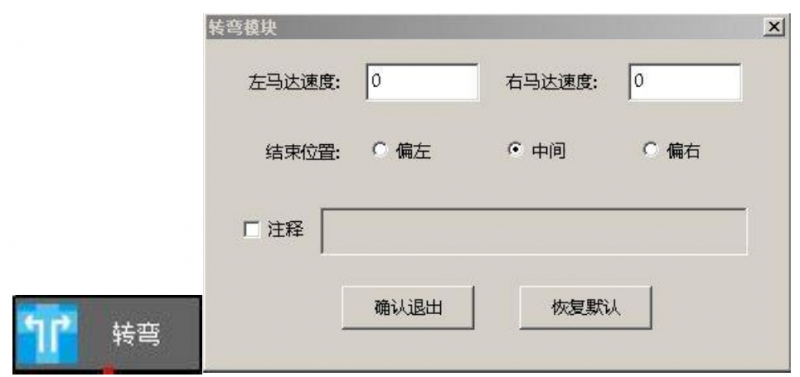
机器人的运动状态是由两个马达控制的,转弯是通过两个马达的速度差实现的差动驱动。
如果把速度看做一个纯粹的数值反向速度视作负数,那么机器人将会向速度值小的一侧转向。
该模块完成 1 次转向的结束标志是部分灰度传感器依次扫过某一线条。
结束位置:决定机器人理论上应该停在“中间、中间偏左”还是中间偏右灰度上。实际上机器人是有惯性的,往往会转过一些,所以当高速左转时这里往往选择“偏左。最终目的是
转弯完成后机器人的姿态最接近理想状态。
6 、 、 、 左转和右转
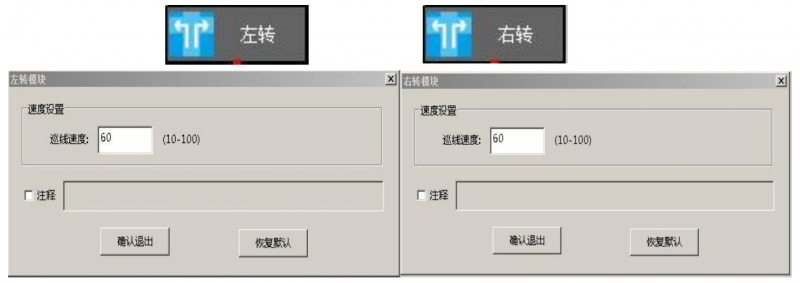
该模块主要用于转弯,速度的快慢只用调节数值大小就可以了,方便选手直接使用。
7 、 启动马达
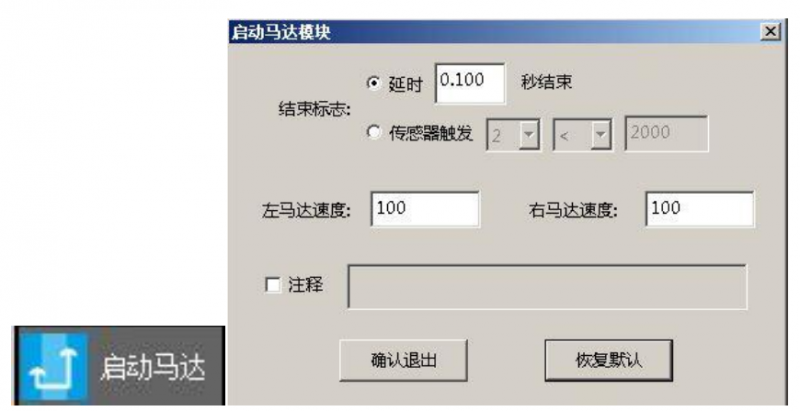
该模块主要用于电机控制,分为按时间控制和按传感器触发控制。如果是按时间控制,
该模块结束时机器人停止动作,如果是传感器触发条件同样是结束该模块传感器返回值需要
满足的条件。
8 、 、 按钮
在控制器程序运行到该模块会暂停,当您按下“ENTER”键后会继续执行后面的程序。在
读取程序需要一定的时间,故在比赛时,在程序前面加上该模块。提前运行程序,再通过按
钮启动机器人,可以节约时间。
籍山中心小学及城西校区同学使用博文账号登录!