学习目标
1. 学习高级巡线模块库中的路口巡线和按时巡线功能;
2. 学习对自己的程序添加必要的注释,养成良好的编程习惯;
3. 在编程及实践活动中,体验成功的乐趣。
本节课,我们将继续学习高级巡线模块中的相关功能,将主要通过路口巡线和按时巡线功能,通过编辑,让机器人跑到任务区并返回基地。
一、了解机器人行走路线:
从基地出发,经过路口,到达任务区,再退回到基地。

二、编程流程:
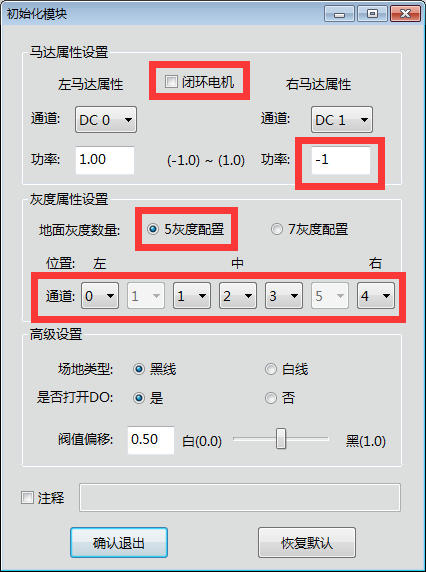
1. 初始化模块:去掉闭环电机,设置右侧电机的功率为-1,设置感应器为5度灰,并设置感应器的顺序为:0、1、2、3、4。
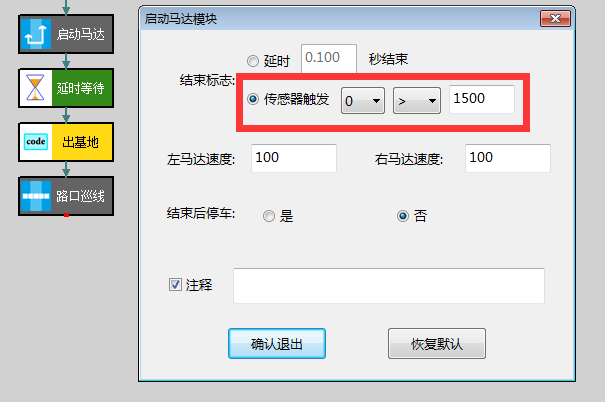
2. 通过启动马达+延时的方式,出基地。
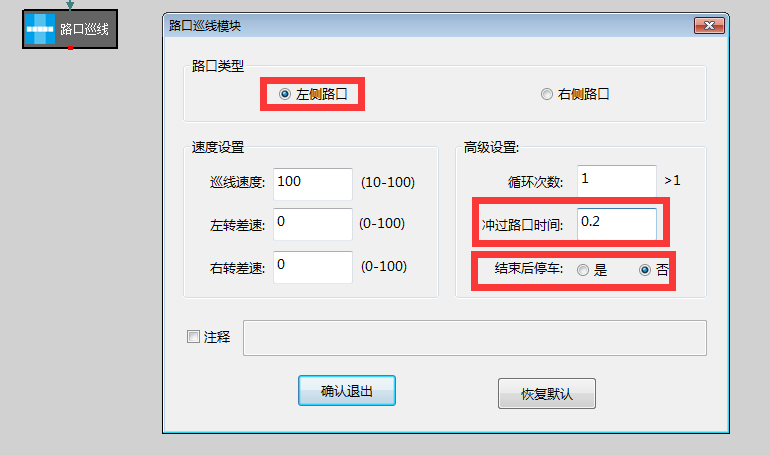
3. 使用路口巡线功能,控制机器人到达路口:路口为左侧,冲过路口时间为0.2秒,并且不停车。
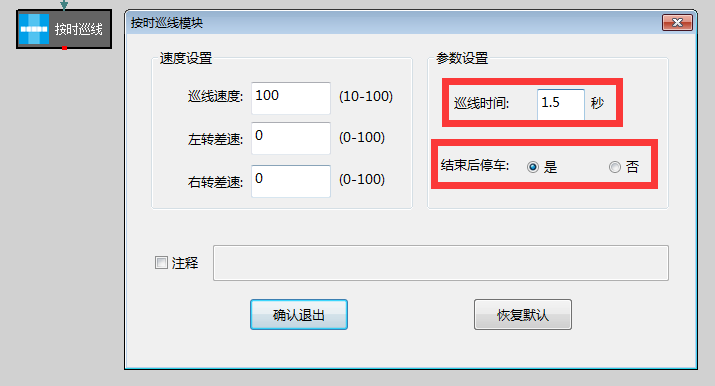
4. 使用按时巡线功能,控制机器人继续向任务区行进:按时巡线速度为100,时间为1.5秒。
5. 到达任务区之后,添加发音模块,代表正常到达。
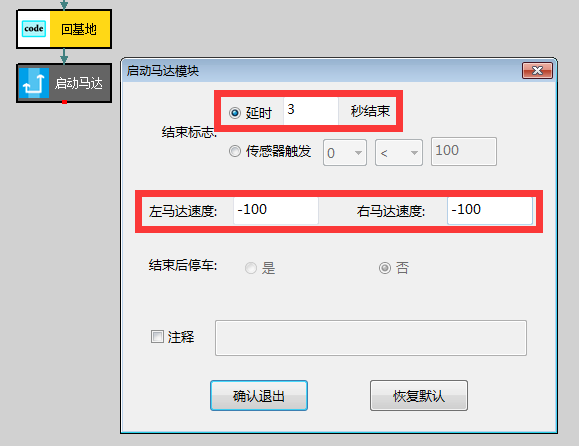
6. 使用启动马达功能,设置左右马达速度为 -100 ,时间为3秒,使机器人退回基地。
三、编程及实践。
思考:路口巡线、按时巡线与启动马达的区别。
籍山中心小学及城西校区同学使用博文账号登录!