本节课,我们将要学习可变位置一的巡线程序,并争取完成“网上购物”任务。
一、了解可变位置一的巡线线路

机器人从基地出发,经过一个弯道到达“路口1”位置,然后左转行驶到“路口2”,再转向可变位置一,再前进到达任务位置。
返回基地按原路返回即可。
二、编程实践
0. 编程准备:
打开程序,将程序名称命名为:1-"你的代号",如 1-t,并将程序保存到你的专用文件夹里。
1. 程序初始化:
在视图菜单下找到巡线模块库,并将巡线模块库勾选。将初始化模块拖到编程区,并按图设置初始化。
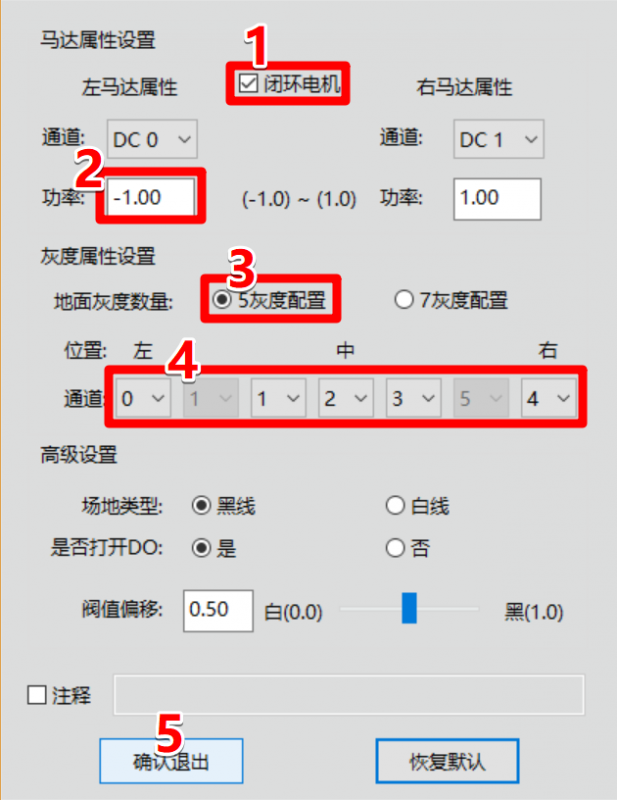
初始化说明: 1-闭环电机要勾选;2-左马达属性的功率设置成-1;3-地面灰度选择5灰度配置;4-通道设置左0,中间123,右4;5-确认退出。
2. 出发前的准备:
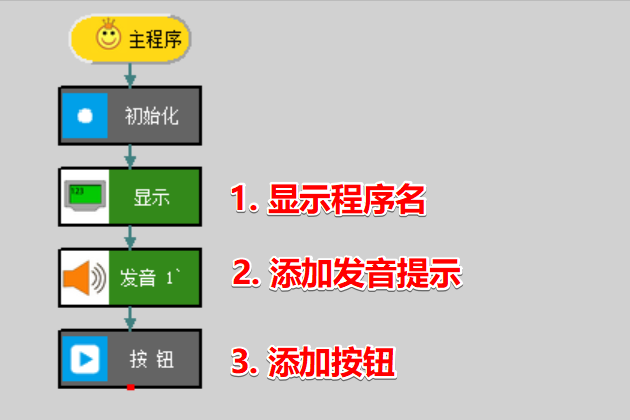
在初始化后面添加“显示”模块,并设置显示模块的属性,在第三行显示你的程序名称,如:1-t。(注意:此处不能使用中文。)
在显示模块后面接着加入声音模块,并设置成你喜欢的揭示音符。
再在发音模块下加入按钮模块。按钮模块的作用,是指程序执行到此处,需要操作者手动按动控制器上的“ENTER”,程序才会继续执行后面的程序。
完成后的程序如下图。
3. 机器人出基地
首先在程序模块库中,找到“自定义”模块,将自定义模块拖入按钮后面,并在代码注释中,写上:“出基地”,表示机器人后面的几个模块使机器人可以跑出基地。
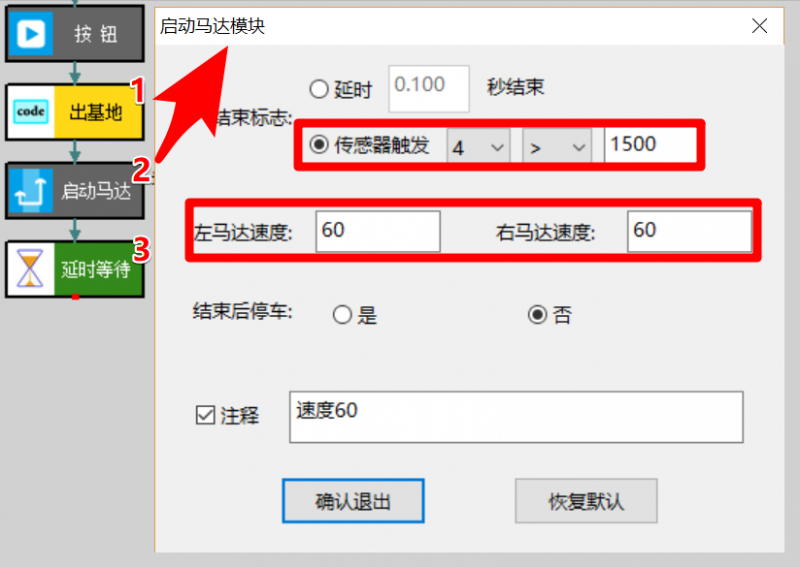
接着加入启动马达模块,在启动马达中设置:4号传感器>1500,左右马达速度都为60;
再添加延时等待模块,设置延时时间:0.2秒;
4. 机器人到任务位置
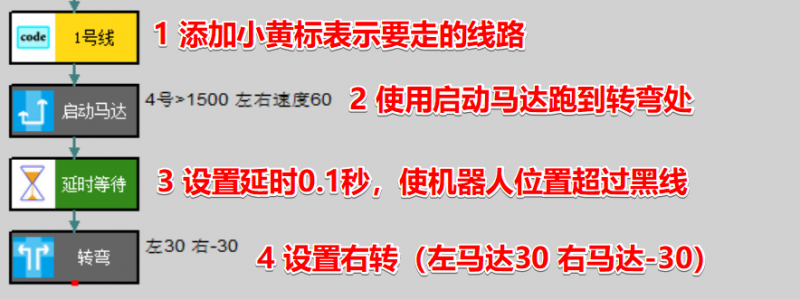
先添加小黄标,输入:1号线,表示机器人要走的路线;
再使用启动马达,设置4号传感器检测黑线(>1500),速度60,使机器人跑到转弯处;
添加延时等待:0.1秒,使机器人冲过黑线;
再添加转弯模块,设置左马达30,右马达-30,使机器人右转;
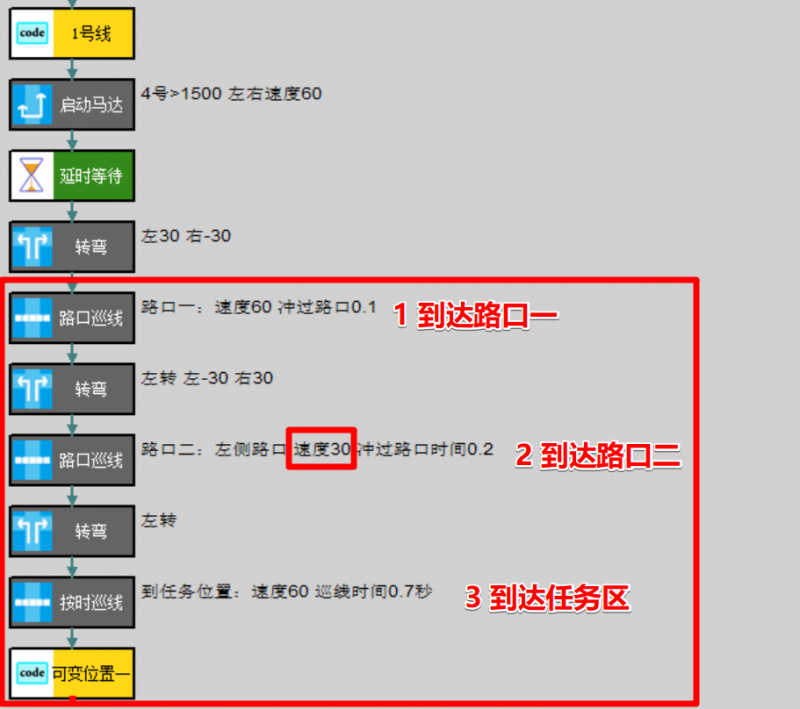
使用路口巡线到路口一,再左转,然后使用路口巡线跑到路口二,注意此处的路口巡线速度为30,冲过路口时间0.2,然后再左转,然后使用按时巡线跑到任务位置。
5. 机器人回到基地
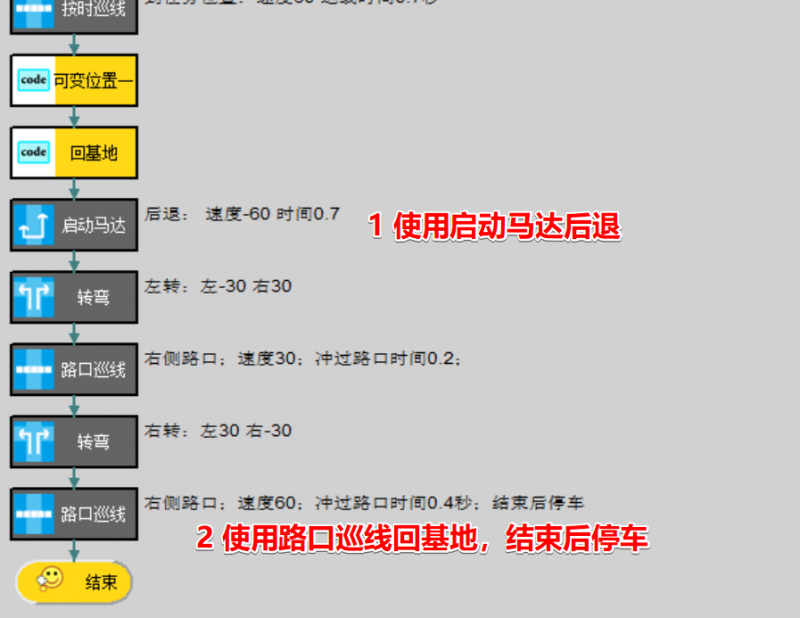
机器人回基地的方式,按照来时的路线原路返回即可,此处留给队员们自己根据地图来编写程序(上面图片仅供参考)。
三、任务:网上购物 (下面的任务模块不再使用)
3.1 网上 购物
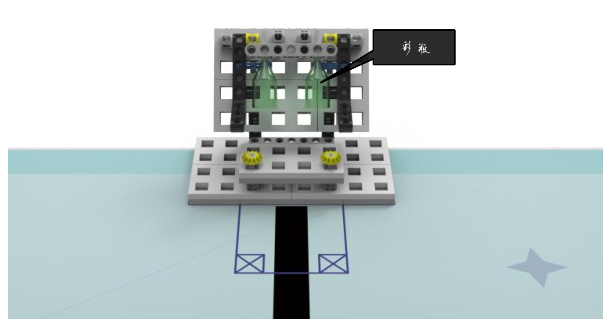
3.2.1 场地上放置着计算机模型,电脑上方有 2 个彩瓶吸在磁铁上,如图 2 所示。
3.2.2 机器人要把彩瓶从磁铁上取下,彩瓶跌落到场地上(与任务模型没有接触)每个得
20 分;如果彩瓶带回基地则每个得 30 分。
3.2.3 携带彩瓶的机器人的垂直投影只要一进入基地即可记分。
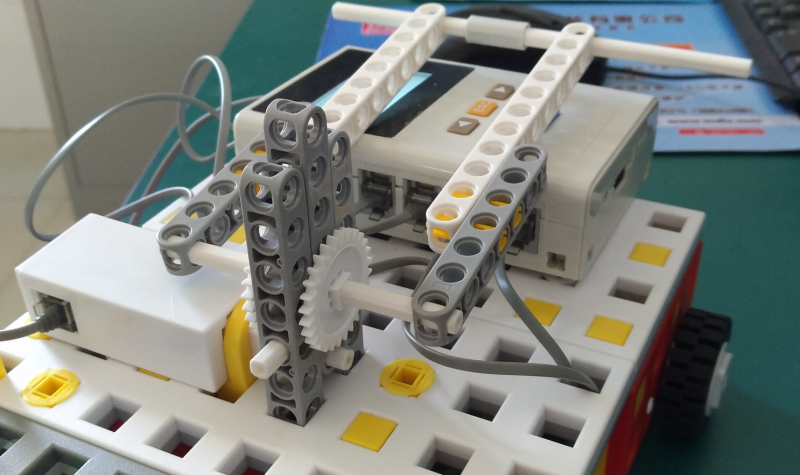
任务手臂:
四、任务编程
网上购物任务需要使用任务电机来完成,首先需要将第三个电机安装到机器人上,并将线接口接入:DC3接口上。
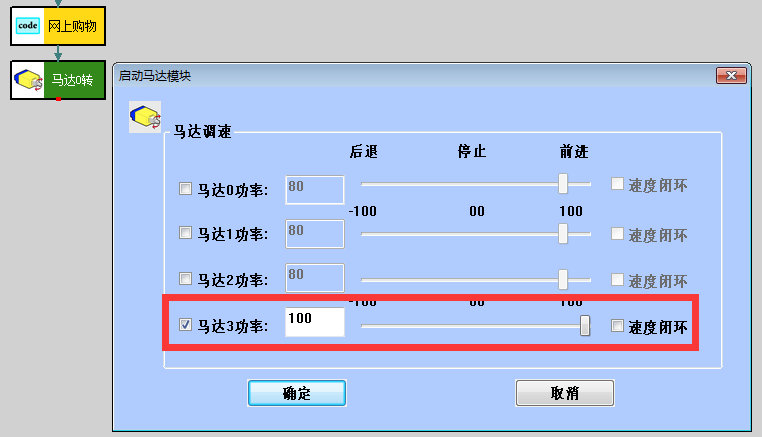
当机器人到达任务位置后,添加马达模块,并设置勾选马达3,并设置马达3的速度为:100
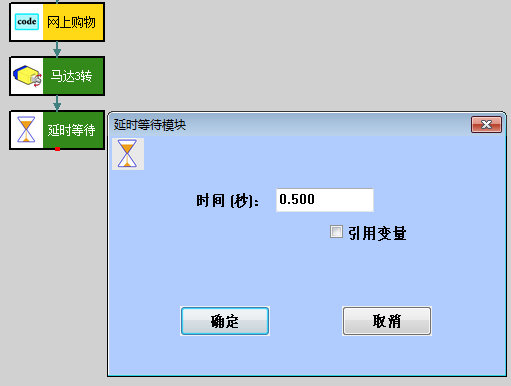
接着添加延时模块,设置延时时间为:0.5秒。(如果时间不够,可调整)
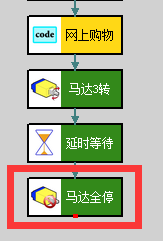
最后添加马达全停模块。使任务电机停止转动。
五、程序测试
程序编写完成后,赶紧拿起机器人下载好程序,进行测试吧。
测试中如果发现机器人并没有正确巡线或正确完成任务,要多动脑、多观察,找原因,想想解决的办法。
籍山中心小学及城西校区同学使用博文账号登录!