学习目标
学习3号线(可变位置三)的巡线;
一、了解路线

机器人出发后的路线与可变位置二的基本一致,只是到路口3位置时,机器人使用启动马达转向反方向,再使用启动马达检测到黑线,然后延时冲过路口,再转弯前进到可变位置三。
回基地的方式,建议直接后退到中间方框,或者掉头再启动马达到中间黑框,然后路口巡线到路口2,后面的与2号线一致。
二、编程实践
1. 程序初始化:初始化、发音、显示、按钮(参考第一课)
2. 机器人出基地:使用启动马达和4号灰度传感器出基地(参考第一课)
3. 到路口3:(参考第二课)
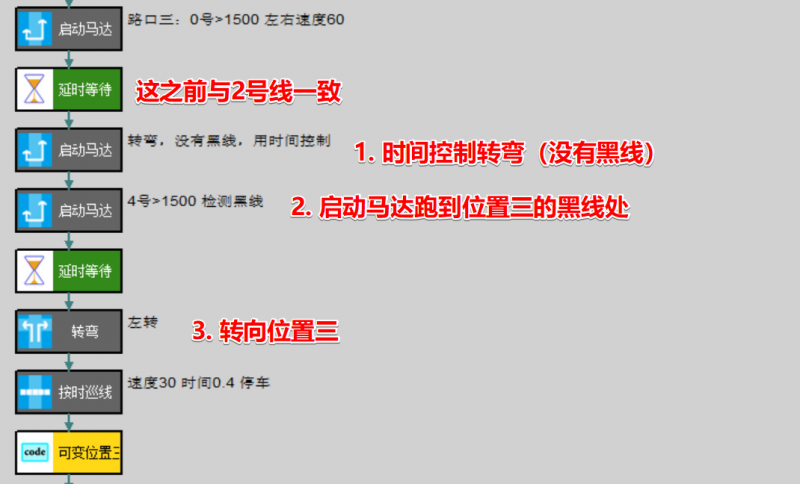
4. 到可变位置三:
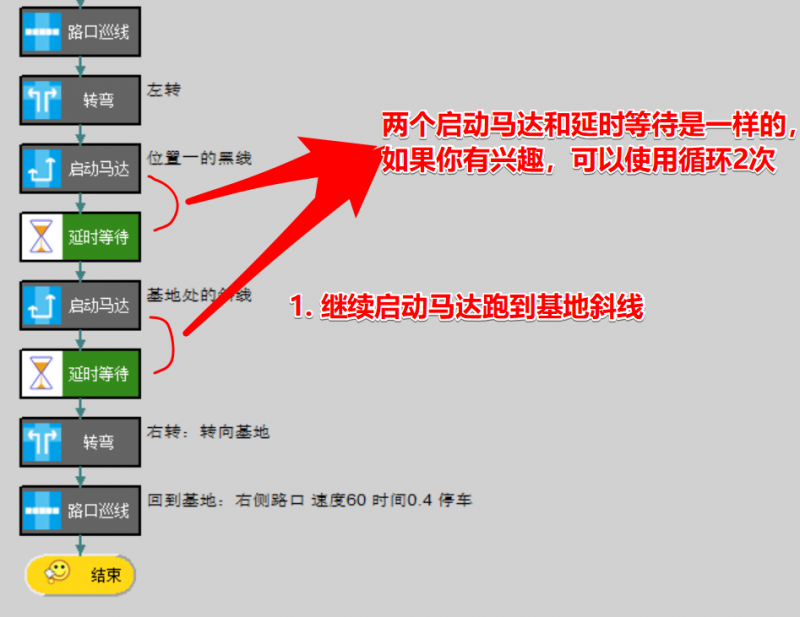
5. 回基地:

籍山中心小学及城西校区同学使用博文账号登录!
这个程序还没有测试