一、了解任务:点燃主火炬。
场地斜坡区最顶端上固定有一只主火炬模型。
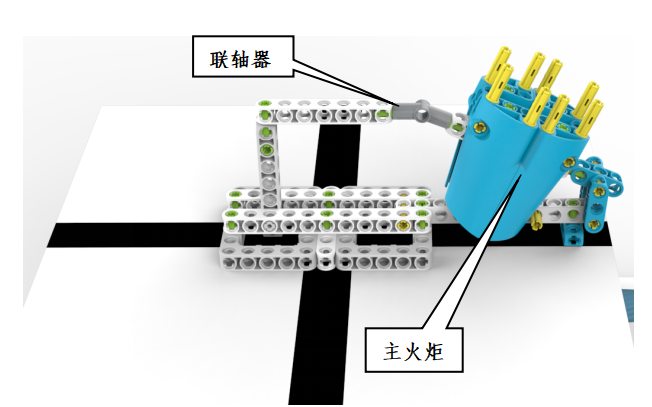
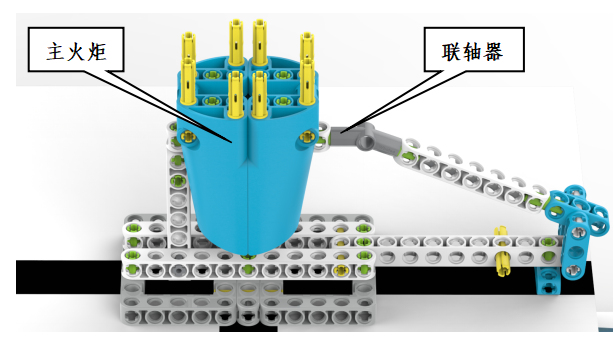
1. 机器人将主火炬放置到水平的70梁上 ,主火炬完全位于联轴器左侧得40分.
2. 机器人沿着斜坡上到斜坡区顶端,将任务3.6中的火炬放置到主火炬上,火炬没有掉落得70分。
必须先完成任务1,才可做任务2。
完成状态:
本节课,主要完成点燃主火炬任务的第一步。
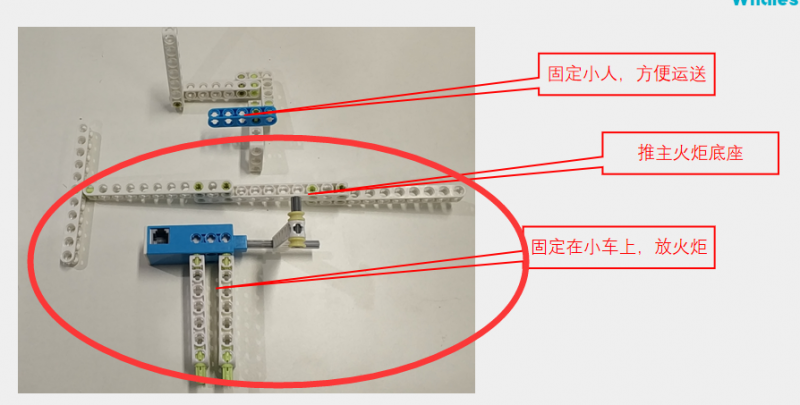
二、拼装手臂:
完成红圈中的任务手臂拼装。
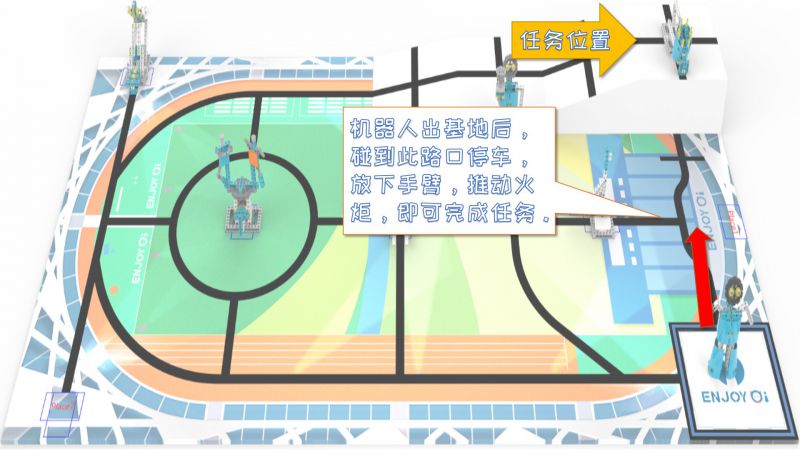
三、路线规划:
机器人从基地出发,碰到第一个路口时即可停车,放下手臂,然后向前推动火炬,再抬起手臂,后退回基地。
四、程序编写:
1. 程序初始化:添加初始化模块,不做修改。
2. 出基地:使用两个启动电机,第1个启动电机使用40的速度,并使用1号传感器碰基地黑线,第2个启动电机使用40的速度,跑0.2秒,使机器人跑出基地。


3. 路口定位:添加启动电机,设置速度为40,并设置1号传感器>1000,使机器人碰到路口即停下。
(此处不推荐使用路口巡线,有时间测试一下便知道。)

4. 完成任务:完成本节课的火炬任务,需要3个动作。第1个是放下手臂,第2个是推动火炬,第3个动作是抬起手臂。
第一个动作放下手臂:添加“动作”中的“电机”模块和“电机停止”模块,设置电机模块为:电机D功率为-20,时间0.5秒(任务电机线接在D口)。

第二个动作推动火炬:添加启动电机,设置电机速度为20,距离为1200。(可以调整距离,使得机器人完成任务的成功率更高。)

第三个动作抬起手臂:抬起手臂动作与放下手臂动作相反,但也是需要两个模块,电机和电机停止。电机设置为:电机D功率20,时间为0.5秒。

5. 返回基地:直接后退返回基地即可。

五、实践操作:
1. 将“程序名”设置为8,然后下载到机器人控制器中(编写的程序要注意保存)。
2. 在场地中调试机器人,并根据程序运行结果,对机器人程序进行修正。
籍山中心小学及城西校区同学使用博文账号登录!