一、了解任务:升会旗
场地某个任务区上固定有一个升旗装置。
机器人需将会旗升到顶端(两处磁铁吸合)得 50 分。
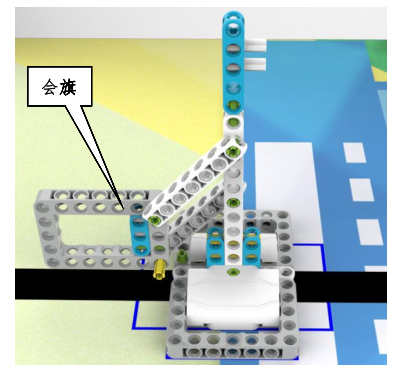
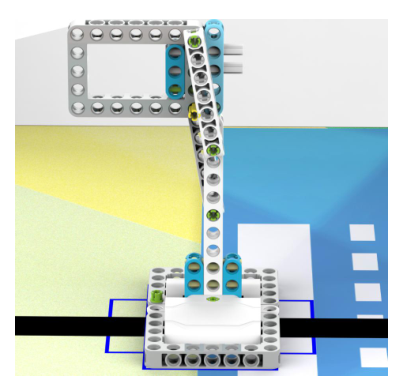
升旗完成状态:
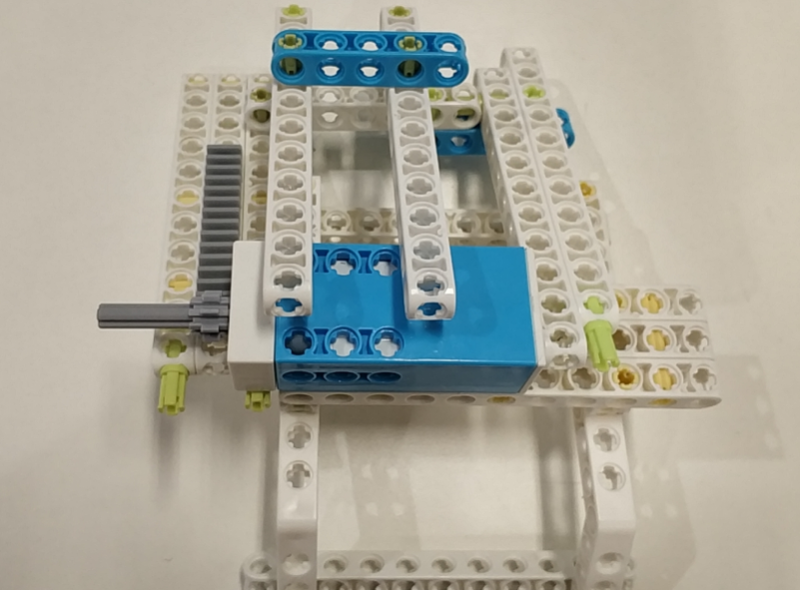
二、手臂搭建:
第一步:
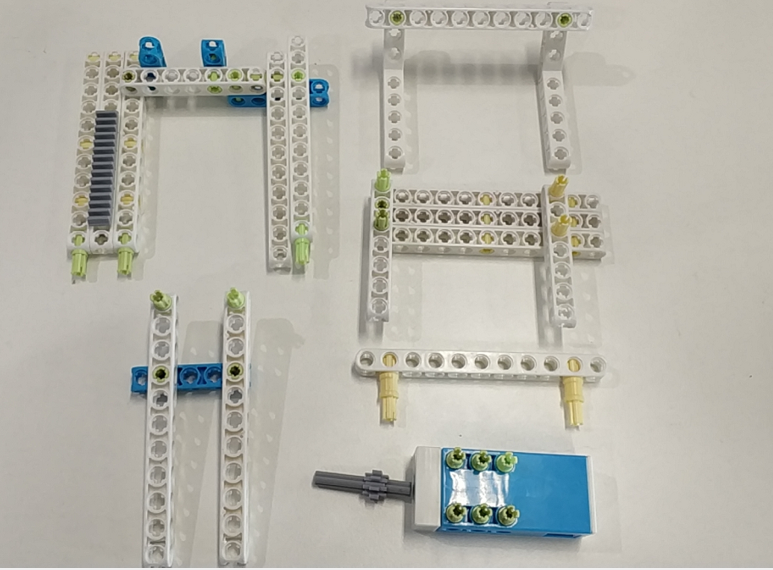
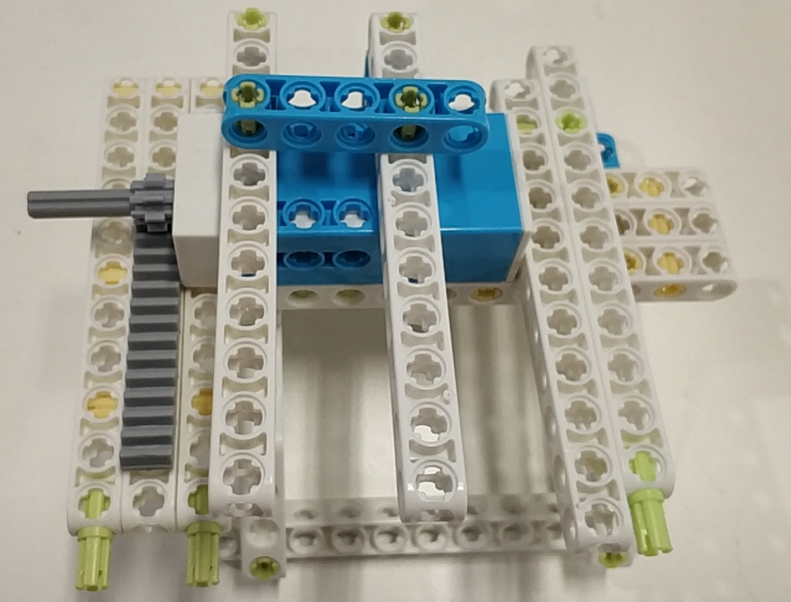
第二步:
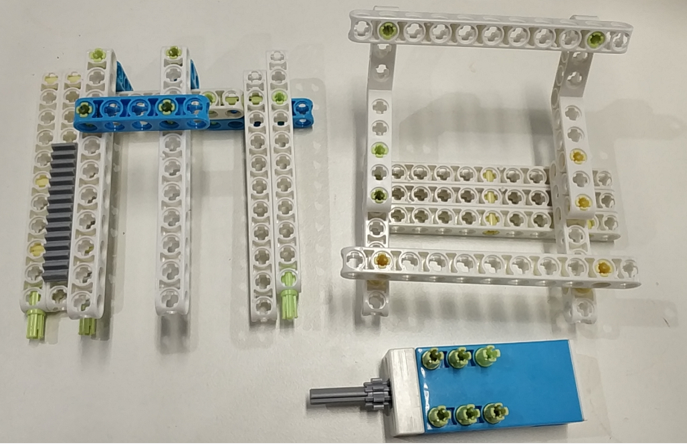
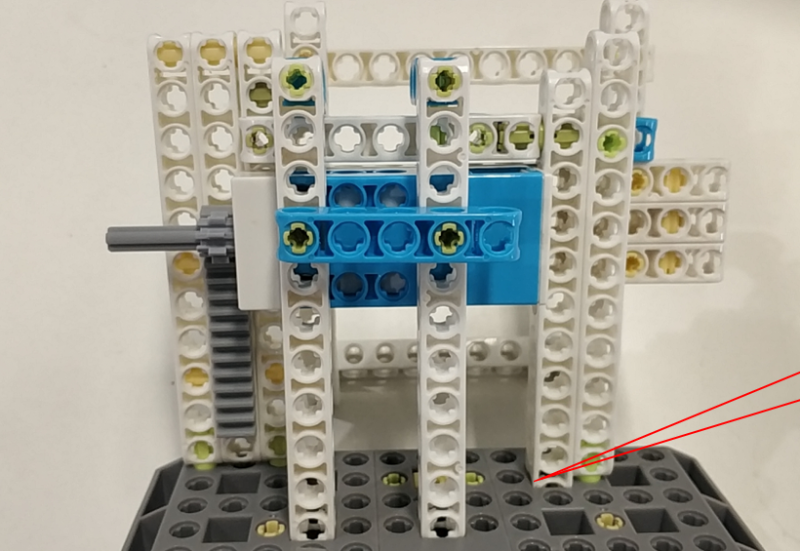
第三步:
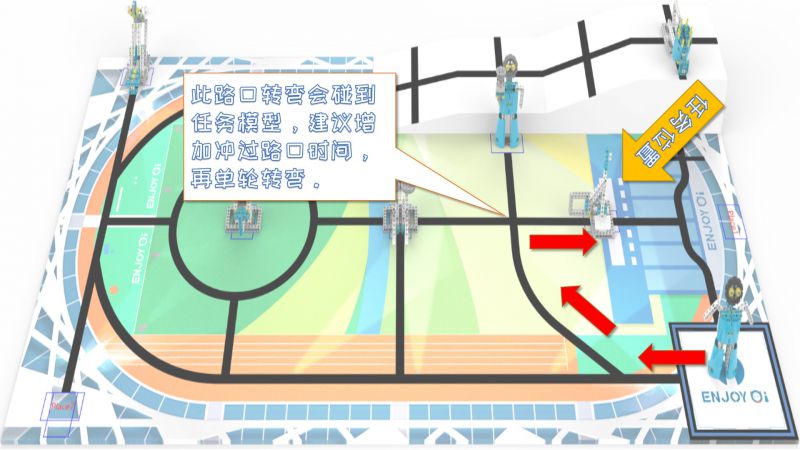
三、路线规划:
机器人向左侧出发,到斜路口后转弯,再遇到十字路口,再向右转弯,转向任务区。
(十字路口转弯时机器人手臂会触碰到会旗模型,导致任务失败,此时可以使用单轮转弯,解决问题。)
四、程序编写:
1. 程序出初化:与前面程序一致,不需要做设置更改。
2. 出基地:两个启动电机实现出基地。第一个启动电机:设置1号传感器大于1000(触碰基地黑线);第二个启动电机:设置时间0.1秒(冲过黑线)。


3. 到任务位置:
添加路口巡线模块,设置为右侧路口,并设置冲过路口时间为0.1秒。

再添加转弯模块,使机器人右转。

再添加路口转弯,使机器人到达十字路口,并增加冲过路口时间,为后面单轮转弯做准备。

添加转弯模块,设置左马达速度为0,左马达速度为-30,实现单轮转弯。

再添加巡线计时模块,设置速度为20,时间为0.3秒,使得机器人到达任务位置区。并设置等待0.5时间。

4. 将会旗升起:
抬起会旗:添加“动作”模块中的“电机”模块,设置电机D功率为30(任务电机接D口),时间为1.2秒,使得机器人抬起电机。
注意电机模块后面应加上“电机停止”模块,让电机停止工作。

推上会旗:添加启动电机模块,设置机器人往前推0.3秒,使得机器人将会旗推上顶端。

5. 机器人回到基地:
后退:设置机器人速度为-30,时间0.4秒,使机器人后退到十字路口处。

转弯:设置右30、右-30,使机器人转弯。

路口巡线:添加巡线路口模块,设置路口类型为左侧,冲过路口时间为0.5秒。使得机器人回到基地。

五、实践操作:
1. 将程序名设置为2,并下载到机器人控制器中。
2. 到场地上操作机器人完成任务,在测试过程中尝试优化程序。
籍山中心小学及城西校区同学使用博文账号登录!