一、原理介绍
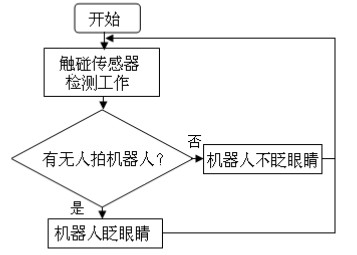
当我们给机器人前面装上触碰传感器。这样,当前面有障碍物时,机器人就能感应到。因此,我们可以根据机器人是否接收到触碰传感器返回的信号为标准来判断是否有人来拍打机器人。如果有人来拍打机器人,则触碰传感器返回值为“1”,在这种情况下我们可以在程序中设定机器人开始眨眼睛;如果没有人拍打机器人,则触碰传感器返回值为“0”, 这时可以让机器人不用眨眼睛。
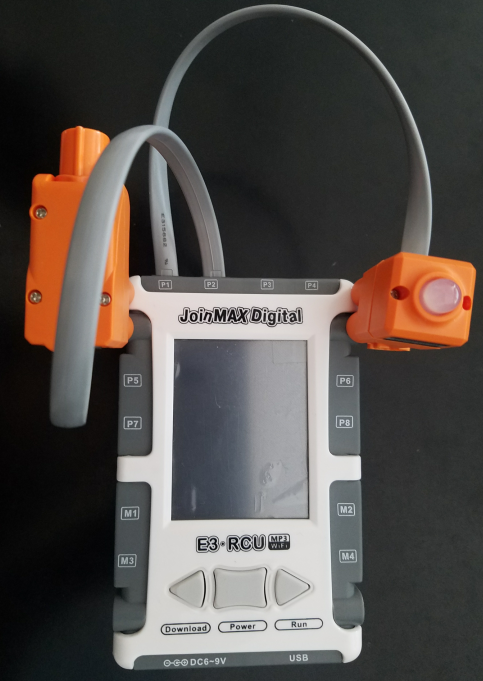
JMP- - BE- - 1611 1 触碰传感器,是一个利用接触轮实现检测触碰与否功能的电子部件。实物图如下:

二、实物搭建
三、程序编写
1、流程图
2、脚本编程
①选择“文件--新建项目”;
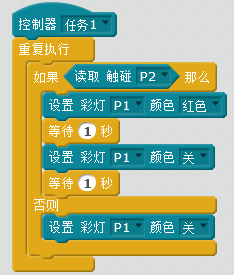
②在【电子模块】中找到“控制器[任务1]”,拖动到脚本区;
③在【控制】中找到“重复执行”和“如果()那么 否则”,拖动到脚本区;
④在【电子模块】中找到“读取 触碰[P1]”,拖动到脚本区;
⑤在【电子模块】中找到“设置 彩灯[P1]颜色[红色]”,拖动3个到脚本区;
⑥在【控制】中找到“等待 1 秒”,拖动2个到脚本区;
⑦按下图设置好模块参数;
⑧选择文件/项目保存,将项目保存在“congmingzhayan”项目中。
3、下载程序到E3·RCU
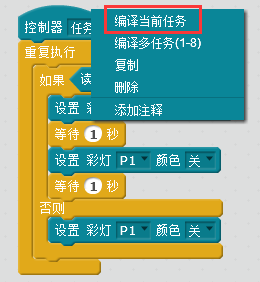
①选中脚本区的“控制器[任务1]”并选择右键,在弹出的菜单中选择“编译”,编译程序,并稍等会儿,直到出现编译成功对话框。如下图:
②先用标配的USB下载线将E3·RCU机器人与电脑USB接口相连,然后打开E3·RCU机器人,并选择“磁盘下载”,如下图:

③最后选择“编译成功”窗口中的“下载”并等一会儿,直到弹出如下窗口,选择“确定”,

这样程序就下载到E3RCU机器人中了,可以离线运行了。重新打开电源,并运行“congmingzhayan”程序。看!机器人多聪明啊,当有人拍着它左边触碰的时候才眨眼睛哦!不拍就闭起眼睛懒得理你呢!
籍山中心小学及城西校区同学使用博文账号登录!