一、原理介绍
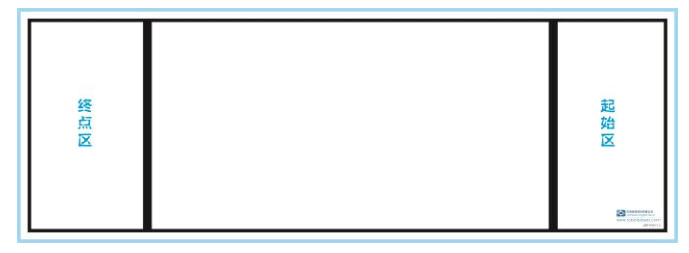
从图纸上看,比赛图纸只有黑白两种颜色,终点线是黑色的,所以我们只要让机器人检测到黑色就当作已到达了终点。我们知道光电传感器(又叫灰度传感器)可以识别黑色和白色。因此,我们可以让机器人用灰度传感器来看终点的黑线,如果看到黑线就可以减速直到停下,否则就要全力冲刺奔向终点。
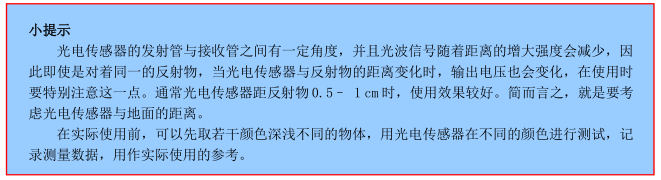
光电传感器的工作原理
光电传感器通过向被测物体发射光波,然后测量反射信号强度的方法实现对物体反射率的测量的。对于黑色之类较颜色比较深的物体,反射信号比较弱,因而输出电平较低;对于白色之类颜色比较浅的物体,反射信号比较强,因而输出电压比较高。通过对输出电压的测量比较,机器人就能判别物体颜色的深浅。
JMP-BE-1125 光电传感器是一个能够区分出不同颜色深浅的电子部件。在环境光干扰不是很严重的情况下,用于区别黑色与其它颜色。它还具有比较宽的工作电压范围,在电源电压波动比较大的情况下仍能正常工作。它输出的是连续的模拟信号,因而能很容易地通过 A/D 转换器或简单的比较器实现对物体反射率的判断,是一种实用的机器人巡线传感器。实物图如下:

二、实物搭建

三、程序编写
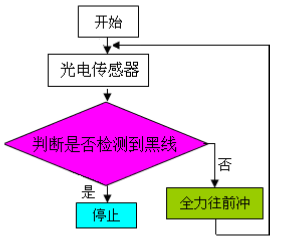
(一)、流程图
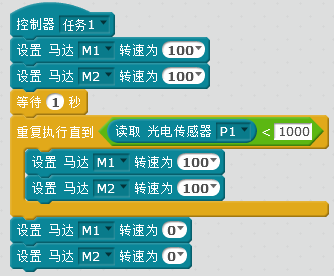
(二)、脚本编程
1、在打开的 Sratch2 For JMD 中选择“文件/新建项目”。
2、在【电子模块】中找到 “控制器[任务1]”,拖动到脚本区。
3、在【电子模块】中找到“设置马达[M1]转速为50”,拖动 2 个到脚本区。
4、在【控制】中找到“等待1秒”,拖动2个到脚本区。
5、在【控制】中找到“重复执行直到”,拖动到脚本区。
6、在【数字和逻辑运算】中找到 “[ ] < [ ]”,拖动到脚本区。
7、在【电子模块】中找到“读取光电传感器[P1]”,拖动到脚本区。
8、在【电子模块】中找到“设置马达[M1]转速为50”,拖动 4 个到脚本区。
9、按下图设置好各模块参数
10、选择文件/项目保存,将项目保存在“yundongyuan”项目中。
(三)、下载程序
1、选中脚本区的“控制器[任务1]”并选择右键,在弹出的菜单中选择“编译”,编译程序,并稍等会儿,直到出现编译成功对话框。
2、先用标配的USB下载线将E3·RCU机器人与电脑USB接口相连,然后打开E3·RCU机器人,并选择“磁盘下载”。
3、最后选择“编译成功”窗口中的“下载”并等一会儿,直到弹出如下窗口,选择“确定”。
这样程序就下载到E3RCU机器人中了,可以离线运行了。重新打开电源,并运行“yundongyuan”程序。
籍山中心小学及城西校区同学使用博文账号登录!