一、了解攀岩任务
3.8.1 场地斜坡区是一处攀岩区,运动员正在进行攀岩,转柄水平如图 15。
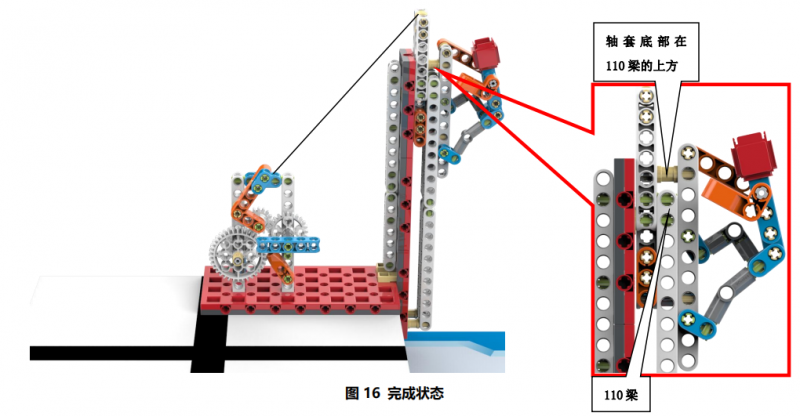
3.8.2 机器人先拨动齿轮使得齿轮啮合,之后转动转柄,使得运动员攀岩成功,得 80 分,如图 16。
3.8.3 运动员顶端轴套底部高于下方 110 梁。

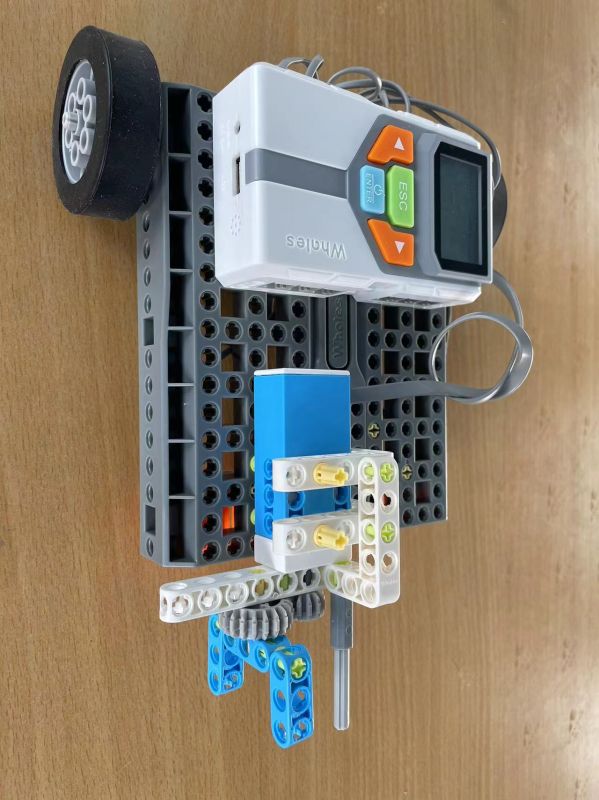
二、机器人手臂(击剑任务手臂换个方向,再加装一根短轴):
三、程序方案:

籍山中心小学及城西校区同学使用博文账号登录!
一、了解攀岩任务
3.8.1 场地斜坡区是一处攀岩区,运动员正在进行攀岩,转柄水平如图 15。
3.8.2 机器人先拨动齿轮使得齿轮啮合,之后转动转柄,使得运动员攀岩成功,得 80 分,如图 16。
3.8.3 运动员顶端轴套底部高于下方 110 梁。
二、机器人手臂(击剑任务手臂换个方向,再加装一根短轴):
三、程序方案:
籍山中心小学及城西校区同学使用博文账号登录!