学习目标
了解积木机器人的构造;
认识电机、灰度传感器,了解它们的作用;
学会拼装积木机器人,认识控制器的不同接口,以及学会正确安装控制器;
亲爱的同学们,欢迎你们进入机器人的世界。从这节课开始,我们将要学习如果拼装WER积木机器人。
一、认识机器人
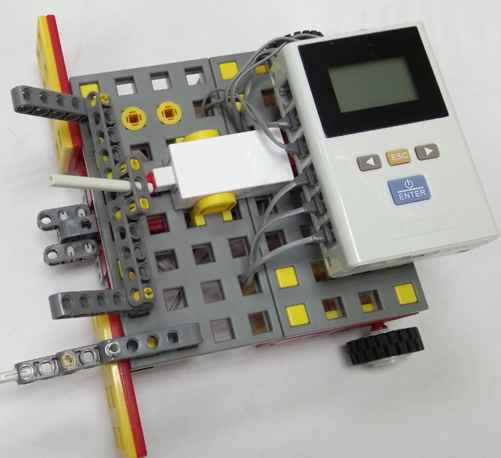
图片所示的机器人,就是已经拼装好的积木机器人,它主要由控制器、电机和相应的积木块组成。
1. 了解灰度传感器
机器人底盘以下的前端,是5个灰度传感器(有的可能是7个),灰度传感器就相当于机器人的眼睛,灰度传感器是通过检测地面的灰度不同,来辨别行走的路线。
灰度传感器从左至右的接入方式,是0~4。按照一定的顺序以及约定去拼装传感器,可以使我们能够快速的了解机器人行走原理,以及在给机器人编写程序时带来便利。
2. 了解电机
机器人底盘下面有2个电机,分别带动两个传动轮,这是机器人可以行动的动力所在。机器人底盘上面还有一个电机,一般用来完成特定的任务,我们可以叫它任务电机。(电机一般分为直流电机和闭环电机,如图所示的是直流电机。)
电机需要接在控制器的DC0~3这4个口上,一般左右传动轮分别接DC0和DC1口,任务电机一般接DC2或DC3口。
二、拼装机器人
积木机器人的样子并不固定,根据我们的想法,我们可以将它拼装成任何我们想要的样子。但通常,我们都会把积木机器人拼成小车的形状,这样便于更好、更快的完成任务。
请参考学习资料中的图片及说明书中的拼装方法,拼装好积木小车机器人。
籍山中心小学及城西校区同学使用博文账号登录!