学习目标
1. 学习高级巡线模块;2. 继续学习转弯模块;3. 在机器人编程实践中体验成功的乐趣。
本节课,将要学习机器人高级巡线模块库中的高级巡线模块。
一、机器人行走路线:
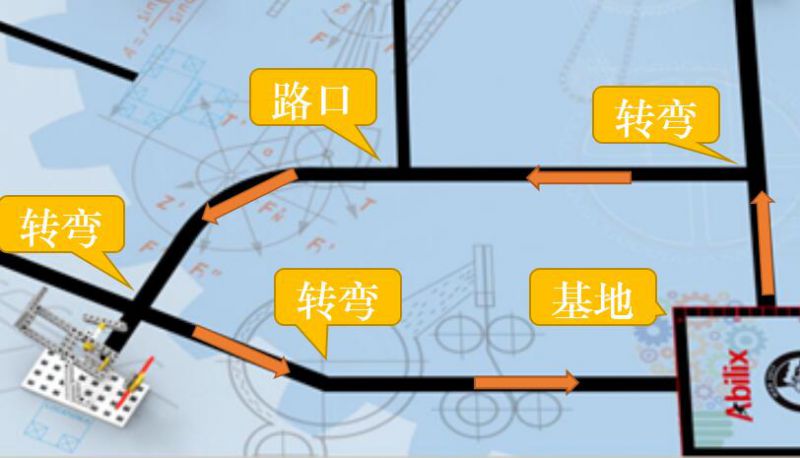
机器人出基地后,遇到第一个路口向左转弯,经过一个路口,再到第二个路口向左转弯,再经过一条小弯道,最后回到基地。
二、编程实践:
1. 打开vjc4.2程序,设置程序名称为 gjxx-。(gjxx-你的代号)
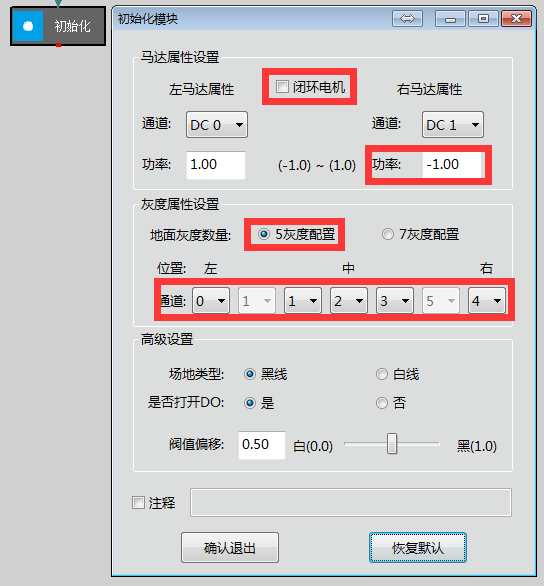
2. 打开高级巡线模块库,添加初始化模块,去掉闭环电机选项,设置右马达功率为-1,设置灰度传感器为5度灰,通道为0、1、2、3、4.
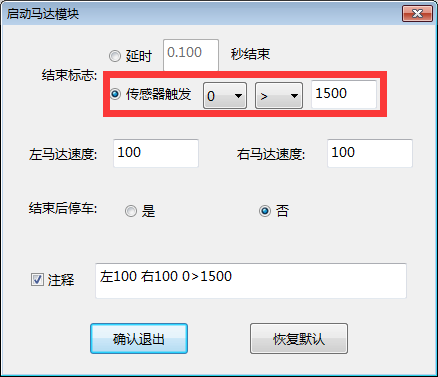
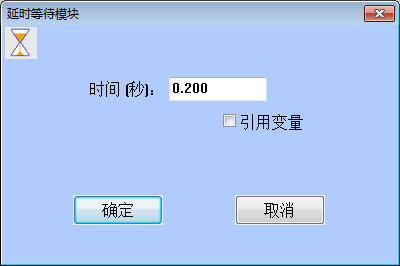
3. 使用启动马达模块,设置0号传感器大于1500为结束标志,左右速度都为100,并在后面添加延时模块,延时0.2秒,使得机器人跑出基地。
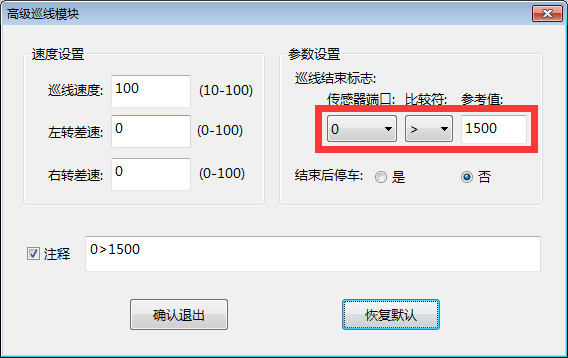
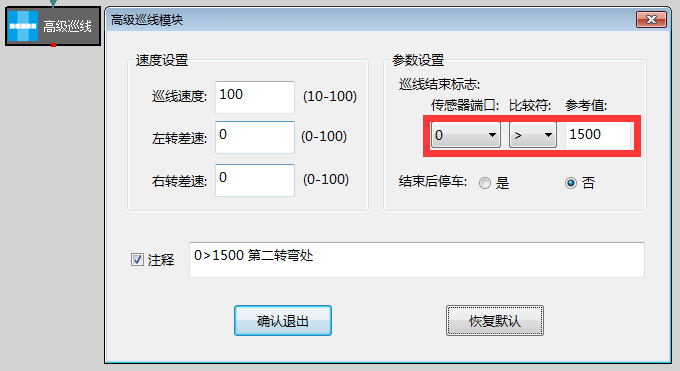
4. 使用高级巡线模块,设置0号传感器大于1500,检测到第一个左侧路口。
5. 在后面添加延时模块,设置延时0.2秒,使得机器人冲过路口。
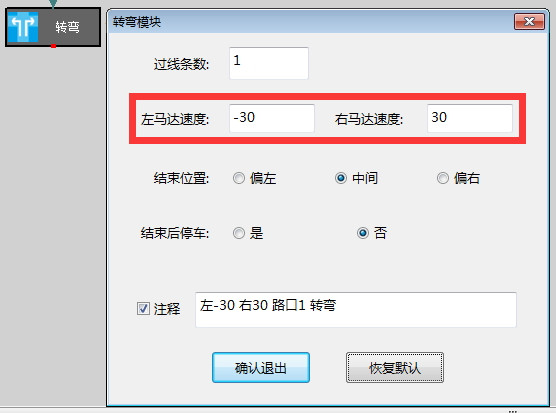
6. 再添加转弯模块,设置左马达速度-30,右马达速度30,使得机器人向左转弯。
7. 再添加高级巡线模块,设置0号传感器,设置大于1500,使机器人直接跑到第二转弯处。
(思考:此处如果用路口巡线应该如何写? 如果使用启动马达是否能跑到正确的位置?)
8. 在高线巡线后面,添加延时模块,设置延时0.2秒。
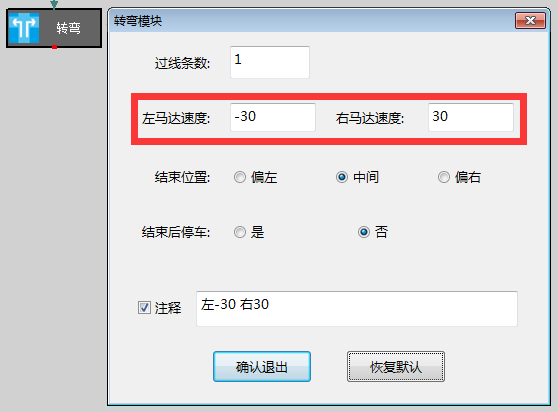
9. 添加转弯模块,设置左马达-30,右马达30,使得机器人转向基地路线。
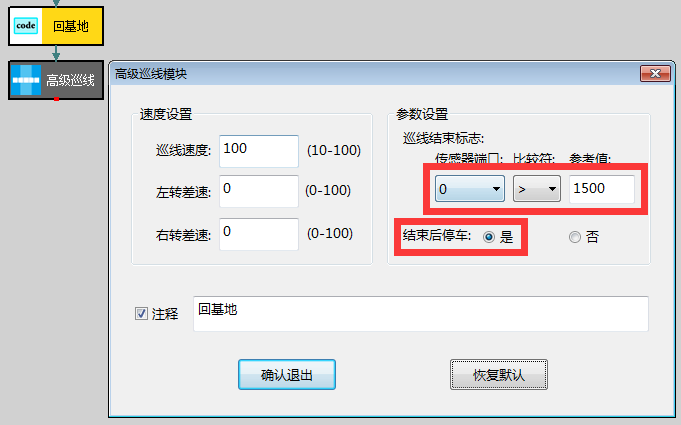
10. 添加高线巡线模块,设置0号感应器大于1500,并且设置结束后停车。
三、操作实践
编写出程序,并下载到机器人控制器,操作机器人,观察机器人行走路线是否与自己预想一致。
四、课后拓展
思考:如果不使用高线巡线,使用其他模块,是否也能实现同样的行走任务?
操作:如果是,请自己动手试一试。
籍山中心小学及城西校区同学使用博文账号登录!
dskfndjknvsfvjvdfjkvkdjgv
牛