上节课,我们第一次通过编程控制机器人发音。这节课我们将使用马达模块,控制机器人的行走。
一、认识马达控制模块
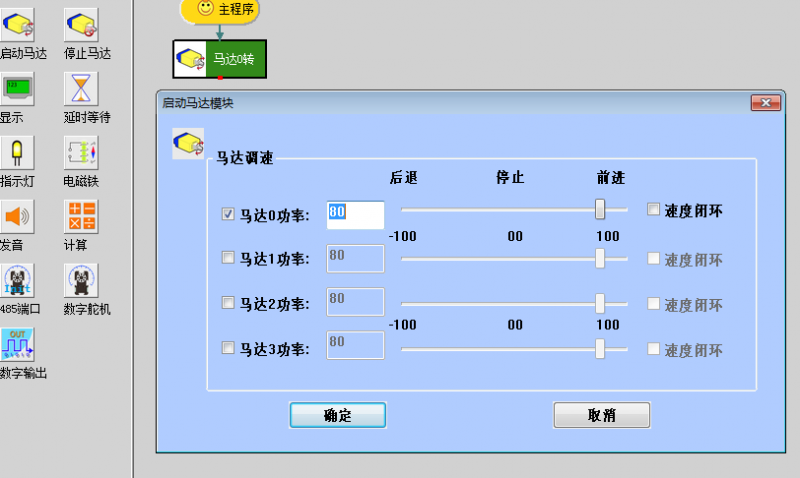
在VJC编程软件的执行器模块库中,有启动马达和停止马达两个模块,我们可以通过这两个功能,使机器人小车行走起来。
控制选项:分别对应机器人控制器中的DC0~3这4个马达接口。通常马达0和马达1是机器人小车的轮子动力控制,马达2和马达3是任务马达控制。
马达的功率:是马达转动速度设置,数值是-100~100之间,如果设置是正数,则马达正转,如果是负数,则马达反转。
速度闭环:如果机器人小车是闭环电机,则勾选,如果是直流电机,则不要勾选。
二、控制机器人小车行走
前进:勾选马达0和马达1,设置马达0的功率为100,马达1的功率为-100,不勾选速度闭环。
后退:同样勾选马达0和马达1,设置与上面相反,马达0的功率为-100,马达1的功率为100,不勾选速度闭环。
转弯:如果小车的两个轮子一个转得快,另一个转得慢,则小车就会转弯。因此,可以设置马达0和功率为80,马达1的功率为-20,则可以实现向右转弯。那么,如果想让机器人小车向左转弯,应该如何控制呢?
转圈:如果希望小车绕着一个轮子转圈,则可以设置一个马达前进或后退,另一个轮子不转动。如果希望小车自转,则可以设置一个马达前进,一个马达后退。
注意:马达转动的速度与电池的电量有关,还和电机齿轮的拼装方式有关,如果齿轮卡住,则会出现小车不动的情况。
三、机器人走8字形

1. 马达第一次转:左60 右20;
2. 马达转动延时时间,需要测试,大约5秒;
3. 马达二次转动:左20 右60;
4. 如果右马达转动与预想的是反向,则设置为负值,如 -20, -60。
赶快动手编写一个机器人跳8字舞的程序吧,让机器人小车跑起来。
课后延伸:
如果希望机器人小车走正方形,应该怎么编?走圆形呢?
籍山中心小学及城西校区同学使用博文账号登录!