本节课将要学习机器人控制中最重要的一个模块库:“巡线模块库”。
一、开启巡线模块库
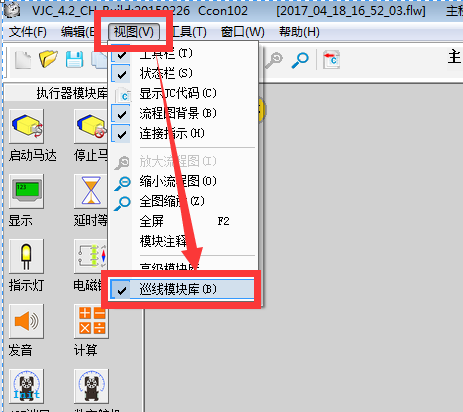
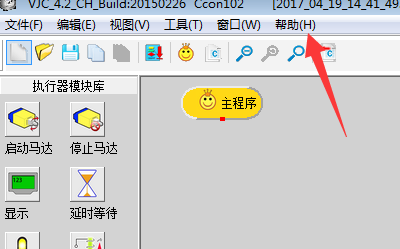
1. 在菜单栏中找到视图菜单,将里面的巡线模块库勾选,则开启了巡线模块库。
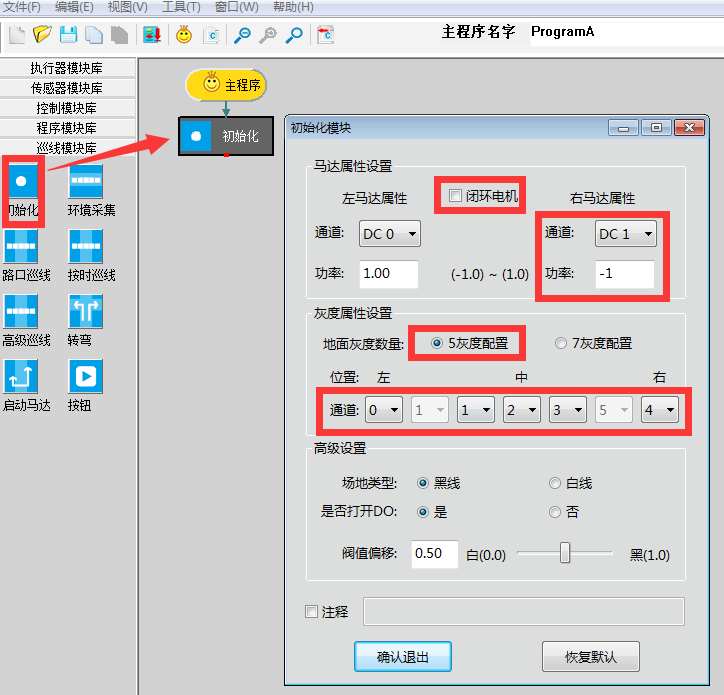
2. 要想使用巡线模块库,必须先进行初始化,初始化时,要根据机器人情况,进行选择。
我们所使用的C203控制器带机器人,不是闭环电机,并且是5个灰度传感器组成,所以初始化时,必须将闭环电机去掉,并设置右马达属性的功率为-1,然后选择灰度数量为5灰度配置,并且配置通道从左往右为:0、1、2、3、4.
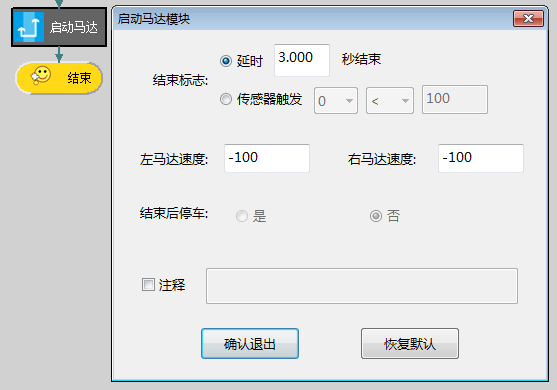
三、认识启动马达模块:
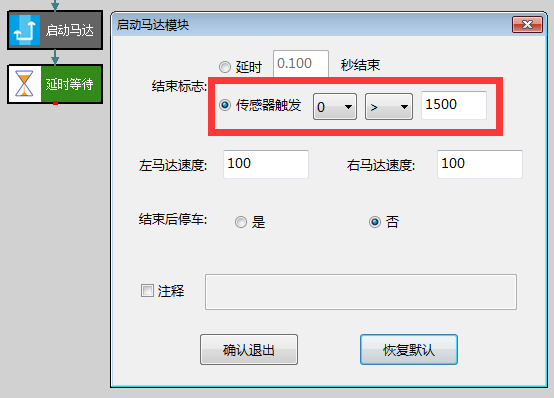
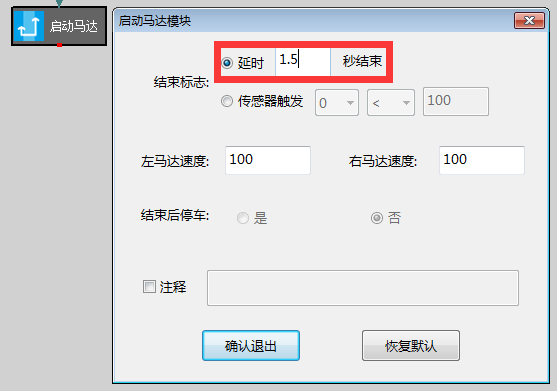
1. 启动马达模块有两种控制方式,一是使用时间控制,比如延时0.1秒,还可以使用传感器触发控制,比如设置某个传感器碰到某条线,然后再执行某个动作等。
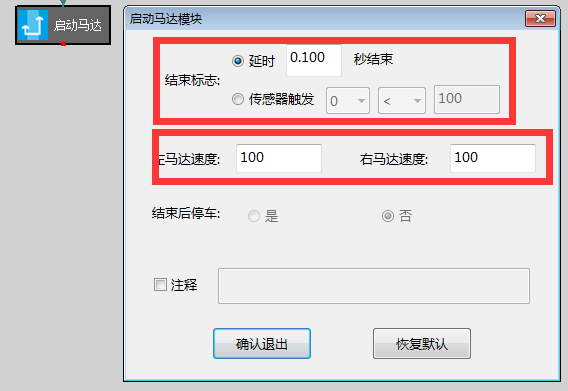
2. 左右马达速度,如果在初始化中设置了右马达功率为-1,则此处全部为正数,则机器人前进,如果全部是负数,则机器人后退。
四、编程实践:

下面将进行如图任务的巡线编程,主要使用启动马达模块。
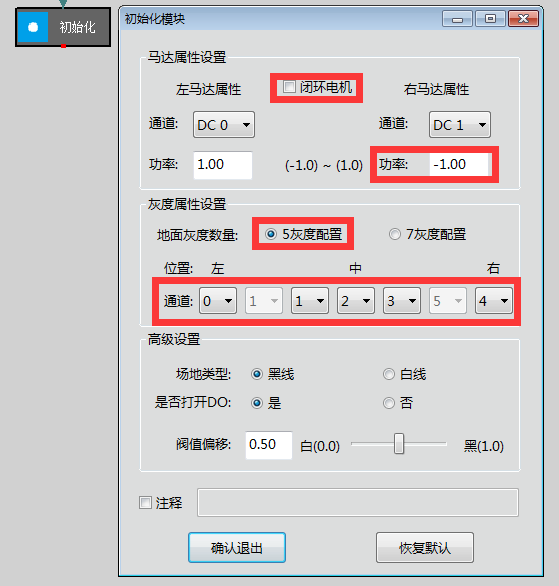
1. 初始化模块:去掉闭环电机选项,设置右马达功率为-1,设置5灰度传感器,并且通道为:0、1、2、3、4.
2. 添加启动马达模块,设置0号传感器值>1500,不停车。然后再添加延时模块,延时0.2秒,使机器人冲出基地。
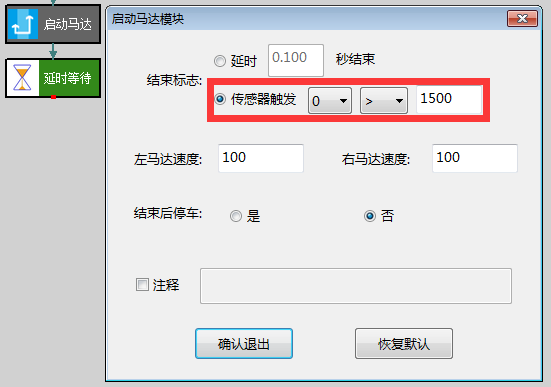
3. 再添加启动马达模块,设置0号传感器值>1500,不停车,使机器人到达第一个路口,再添加延时模块,延时0.2秒,使机器人冲过路口。
(思考:为什么是0号传感器检测?)
4. 再添加启动马达模块,使用时间控制马达,延时1.5秒停车,让机器人小车跑到任务位置。
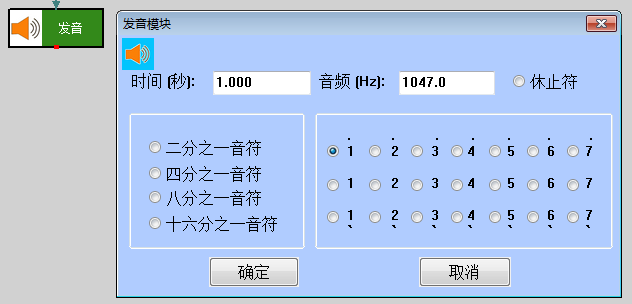
5. 添加发音模块,代表机器人抵达任务区。
6.添加启动马达模块,设置左右马达速度都为-100,使用时间控制,延时3秒,让机器人退回到基地,任务完成。
五、拓展学习
阅读VJC4.2的帮助手册。打开方式:在菜单栏中的帮助菜单里,找到帮助主题。
籍山中心小学及城西校区同学使用博文账号登录!