本节课将要学习WER2017普及赛1号线位置的巡线任务,因为1号线并没有预设任务,所以本节课并不涉及任务模块的完成,只有巡线任务。我们需要了解的是,没有预设任务,并不代表这个位置就没有任务,任务一个预设任务都会出现在这个位置。
一、了解1号线巡线任务

机器人从基地出发,向左前进,并经过一个小弯道,到达第一个路口位置,继续前进到达第二个路口位置,再继续前进到达第三个路口位置,并向左转弯,再前进到达任务位置。
因为线路较长,所以机器人返回基地时应当巡线回家。
二、编程实践
1. 打开VJC4.2程序,并设置程序名称为 1-(你的代号)。
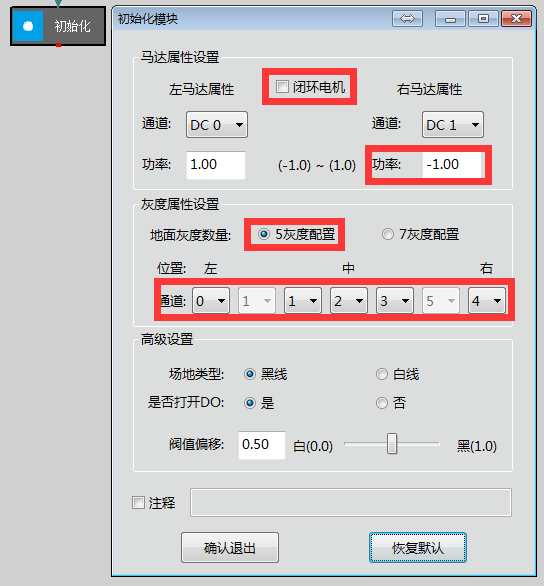
2. 打开高级巡线模块库,添加初始化模块,并去掉闭环电机选项,设置右马达属性中功率为-1,设置传感器为5度灰,并从左至右分别为0、1、2、3、4。
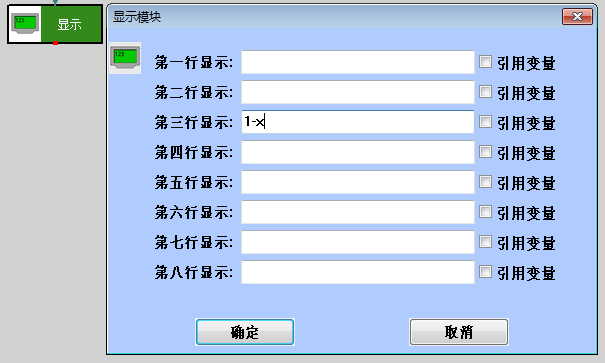
3. 添加显示模块,设置在机器人屏幕第三行显示: 1-x 。(机器人屏幕显示不能使用中文,1-x代表1号线。)
4. 添加按钮模块。(按钮的作用,是程序执行到此位置时,需要按一下Enter键才会继续执行后面的程序。)

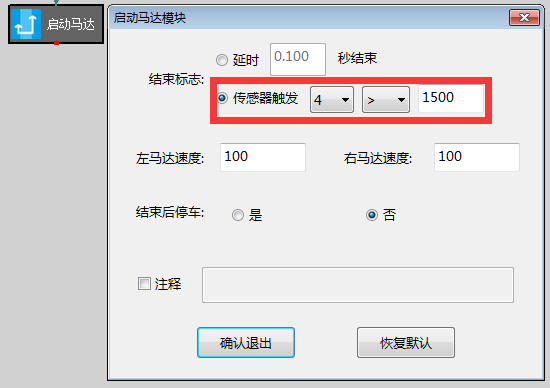
5. 添加启动马达,设置结束标志为4号传感器大于1500,并设置结束后不停车。再在此模块后面添加延时模块,设置延时时间为0.2秒,使得机器人冲出基地。
(思考:为什么要使用4号传感器触发结束标志?)
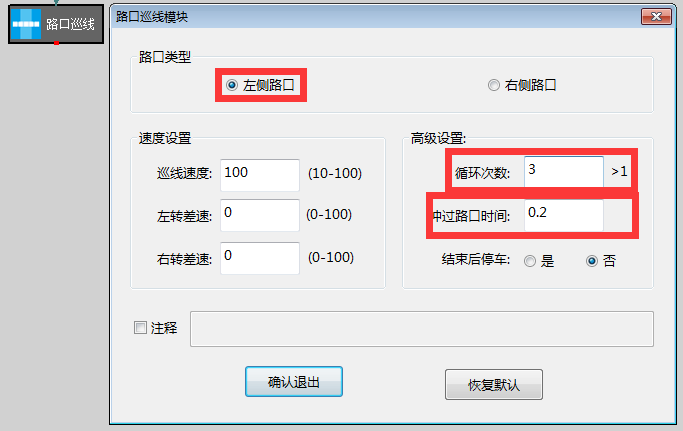
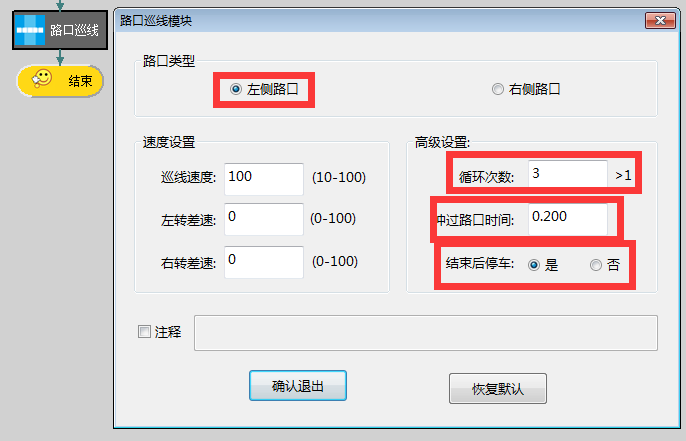
6. 添加路口巡线模块,设置路口类型为左侧路口,并设置循环次数为3,冲过路口时间为0.2,结束后不停车。
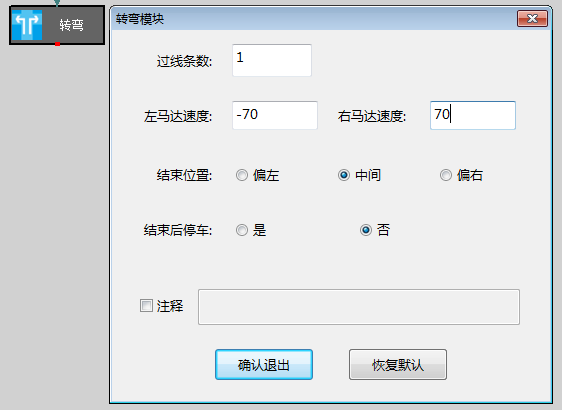
7. 添加转弯模块,设置左马达速度为-70,右马达速度为70,使机器人转向任务位置。
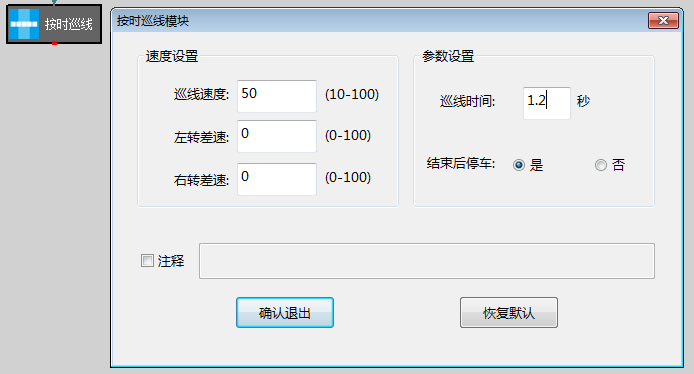
8.添加按时巡线模块,设置巡线速度为50,巡线时间为1.2秒,使机器人跑到任务位置。
9. 添加自定义注释,并写上“任务位置1”,再添加发音模块,设置机器人发音,代表机器人抵达任务区。

10. 添加自定义注释,并写上“回基地”,表示后面的模块,是让机器人回到基地。

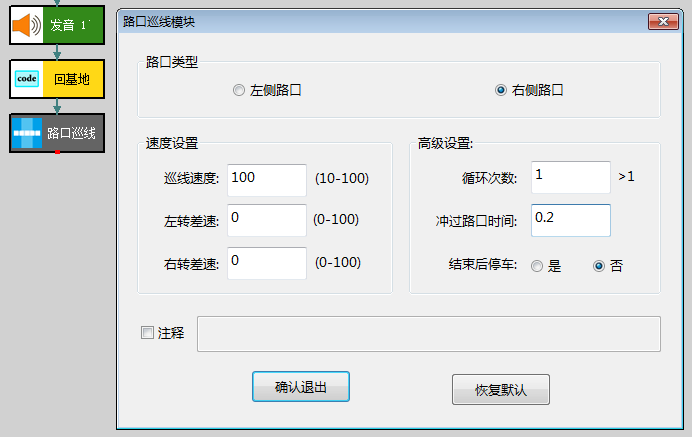
11. 添加路口巡线模块,设置机器人巡右侧路口,并设置冲过路口时间为0.2秒。
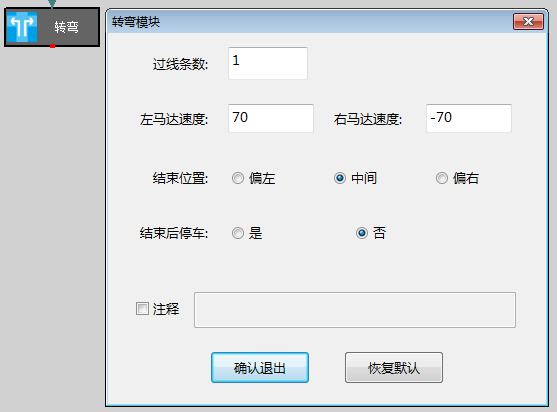
12. 添加转弯模块,设置机器人左马达为70,右马达为-70,使机器人转向基地。
13. 添加路口巡线,设置路口类型为左侧路口,并循环3次,冲过路口时间为0.2秒,结束后停车。
最后给程序中一些重要位置,添加相应的注释说明,并保存好程序。
三、操作实践
1. 将程序下载编译到机器人的控制器中,并执行程序,检查机器人跑动线路,并根据机器人运行结果,对程序进行修改。
2. 在操作实践中多观察,多思考,了解机器人电量对机器人跑动的影响。
3. 对程序进行多种测试,保证程序的稳定性,争取通过不断修改,使程序的运行正确率提高。
籍山中心小学及城西校区同学使用博文账号登录!
特别说明:回基地时,应当使用路口巡线中的右侧路口,因为巡左侧路口会因为第二个路口过线而无法继续巡线。