本节课我们将要学习2017WER普及赛最后一个位置和任务:9号线和开采铁矿。9号位置的巡线相对于其他位置,都更简单,任务也相对简单,并且在WER基础课程中,我们也学习了这个位置的巡线编程,希望同学们能够在这节课中,能够更加自主的去探索,设计出更加巧妙的手臂来解决这个任务。
一、了解9号位置巡线任务

机器人向上出发,到达路口后继续前进到达任务位置。
机器人后退直接回到基地。
二、九号线巡线编程
1. 打开VJC4.2编程软件,设置程序名称为 9-kctk-代号, 9代表位置9(LOCATION-9),kctk代表开采铁矿的任务,代号是你的专属代号。
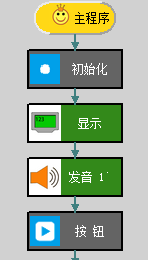
2. 程序初始化:去掉闭环电机选项,设置右马达功率为-1,设置传感器为5灰度配置,并设置顺序为:0-1-2-3-4。之后,添加显示模块,发音模块和按钮控制模块。
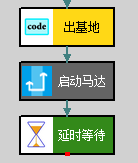
3. 添加启动马达模块,设置左右马达速度为100,设置结束标志为0号传感器大于1500。
4. 添加延时模块,设置延时0.2秒,使机器人冲出基地。
5. 添加路口巡线模块,设置巡左侧路口,并设置冲过路口时间为0.2秒。
6. 添加按时巡线模块,设置巡线速度为70,巡线时间约为1.2秒,结束后停车,使机器人到达任务位置。
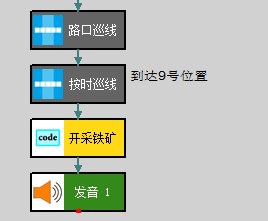
7. 添加发音模块,代表机器人到达任务区域。
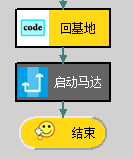
8.添加启动马达模块,设置马达左右速度都为-100,时间约为2.5秒,使机器人直接退回基地。
三、巡线实践
1. 将编写的程序下载到控制器中;
2. 反复测试机器人巡线,根据巡线情况修正程序中的错误,以提高巡线成功率。
四、了解任务

1. 机器人将铁矿石搬离任务模型区,得20分;
2. 机器人将铁矿石搬离任务模型区且运回基地,铁矿石部分投影进入基地,得40分。
3. 运回矿石的手臂可根据矿石特点,制作一个钩子。
五、 编程实践
1. 机器人跑到9号位置后,使用转弯模块,使机器人180度转弯,并在转弯过程中,勾住矿石;
2. 将原先后退回基地的方式改成前进回基地。
六、操作实践
1. 将修改后的程序下载到机器人控制器中;
2. 将手臂安装到机器人上,操作机器人,测试机器人完成任务的程序,并根据测试结果,反复修改程序,以提高完成任务的成功率。
籍山中心小学及城西校区同学使用博文账号登录!