本节课将要学习七号位置(LOCATION-7)的巡线任务及获取能量块的任务。
一、了解七号线巡线任务
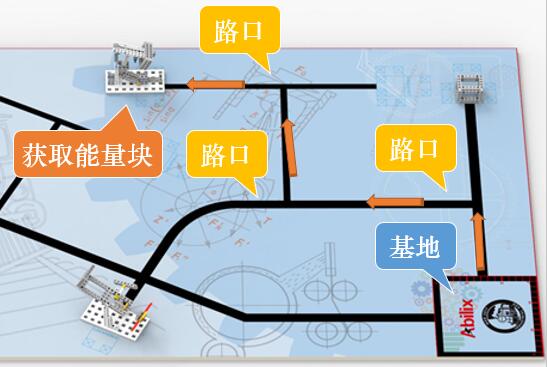
机器人向上出基地,到达第一个路口向左转弯,然后前进到丁字路口向右转弯,再前进到第三个丁字路口向左转弯,然后前进一点到达任务位置。
机器人后退到达路口位置,然后向左转弯,再前进到达丁字路口位置再向左转弯,然后再前进到达路口,再向右转弯,再前进回到基地。
二、巡线编程实践
1. 打开VJC4.2,设置程序名称为7-nlk-代号,其中7表示7号位置,nlk表示获取能量块任务,代号则是你的专属代号。
2. 初始化程序,去掉闭环电机选项,设置右马达属性为-1,并设置机器人为5度灰,灰度传感器顺序分别为0-1-2-3-4。
3. 添加启动马达模块,设置左右马达速度都为100,并设置结束标志为0号传感器大于1500.
4. 添加延时模块,设置延时时间为0.2秒,使机器人冲出基地。
5. 添加路口巡线模块,设置巡左侧路口,冲过路口时间为0.2秒。
6. 添加转弯模块,设置左马达速度为-100,右马达速度为100,使机器人向左转弯。
7. 添加路口巡线模块,巡右侧路口,冲过路口时间为0.2秒。
8. 添加转弯模块,设置左马达速度为100,右马达速度为-100,使机器人向右转弯。
9. 添加路口巡线模块,设置冲过路口时间为0.2秒。
10. 添加转弯模块,设置左马达为-100,右马达速度为100,使机器人向左转弯。
11. 添加按时巡线模块,设置巡线速度为50,巡线时间为1.2秒左右,结束后停车。(机器人到达LOCATION-7位置)
12. 添加发音模块,设置一个短发音,代表机器人到达任务位置。
13. 添加启动马达,设置左右马达速度为-50,结束标志为延时1.2秒。
14. 添加转弯模块,设置左马达速度为-100,右马达速度为100,使机器人向左转弯。
15. 添加路口巡线模块,使机器人跑到中间的路口,并设置冲过路口时间为0.2秒。
16. 添加转弯模块,设置左马达速度为-100,右马达速度为100,使机器人向左转弯。
17. 添加路口巡线模块,使机器人巡到丁字路口,冲过路口时间为0.2秒。
18. 添加转弯模块,设置左马达速度为100,右马达速度为-100,使机器人向右转弯。
19. 添加路口巡线模块,设置机器人冲过路口时间为0.2秒,结束后停车。(机器人跑回基地。)
三、操作实践
1. 将编写的巡线程序下载到机器人控制器中;
2. 操作机器人执行巡线程序,并在不断的测试中修改程序,以提高巡线成功率。
四、了解获取能量块任务

1、模型底板固定在场地上,场地任务模型上放有2个能量块。
2、机器人要把能量块从任务模型上取下,并带回基地,每块得30分。

3. 获取能量块手臂
五、任务编程
1. 获取能量块机器人撞击一下就可以实现让能量块掉落,所以不需要再编写额外的模块。
六、任务实践
1. 将程序下载到控制器中,并给机器人安装手臂;
2. 操作机器人,测试程序。
籍山中心小学及城西校区同学使用博文账号登录!