本节课,我们要学习三号线的巡线用开采铜矿的任务。三号线相比之前的三号和一号线,使用的基本模块是一样的,不同的地方在于路口数,也就是路口巡线的过线条数。开采铜矿的任务可以使用不同的手臂来完成,不同手臂需要使用不同的编程方法,这个需要同学们开动脑筋,去大胆挑战。
一、了解三号线巡线任务
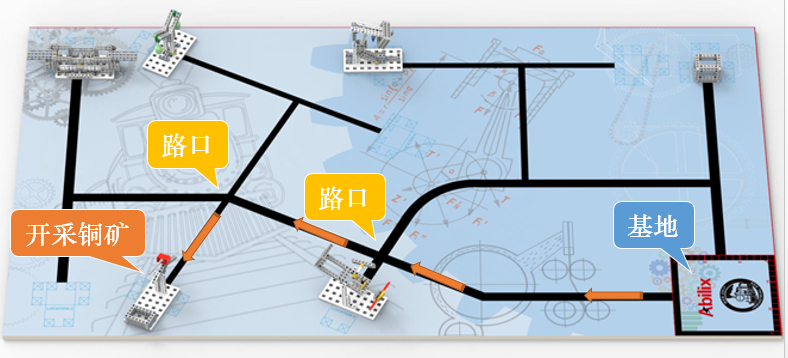
机器人从基地出发,向右经过小弯道到达第一个路口,再继续前进到达第二个路口,然后向左转弯,然后再前进一点点到达任务区。回基地的方式依然是巡线回家,从任务位置后退到路口处,再向左转弯面向基地,然后路口巡线经过2个路口回到基地。
二、编程实践
1. 打开VJC4.2编程软件,并设置程序名称为 4-kctk-(你的代号),4代表4号线,kctk代表开采铜矿任务。
2. 打开菜单中的高线巡线模块,并对机器人进行初始化。
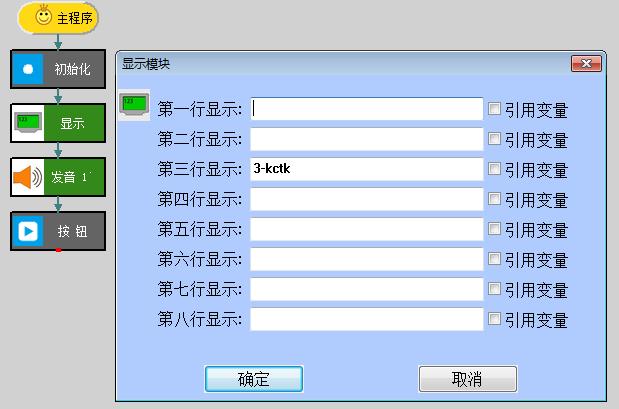
3. 在初始化之后,添加显示模块,在第三行设置显示"4-kctk",代表第4条线-开采铜矿任务。
4. 添加发音模块,并设置一个短促的发音,提示初始化完成,机器人已经准备就绪。
5. 添加按钮模块,使程序执行到此进入等待状态。
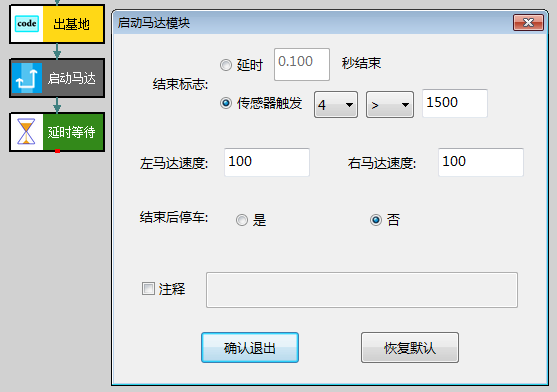
6. 添加启动马达模块,并设置结束标志为4号传感器大于1500,结束后不停车,再继续添加一个延时模块,设置延时时间为0.2秒,使机器人跑出基地。
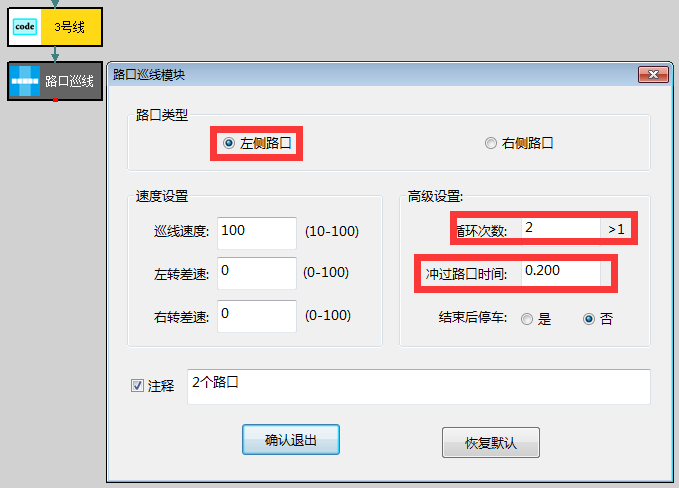
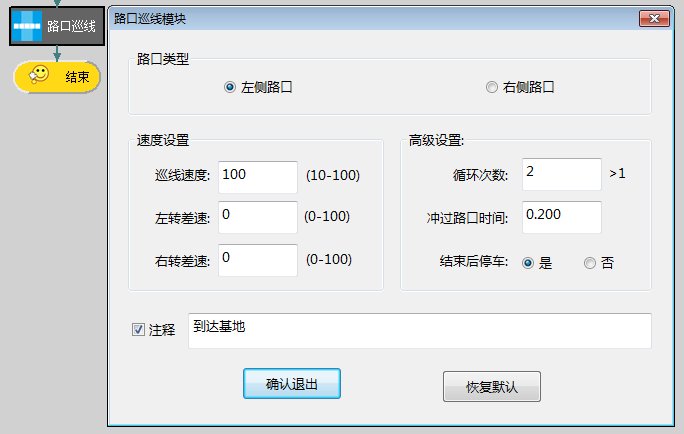
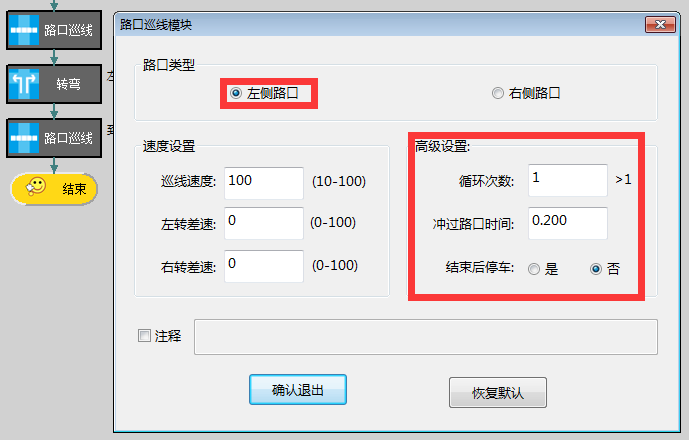
7. 添加路口巡线模块,设置左侧路口,并循环2次,设置冲过路口时间为0.2秒,结束后不停车。
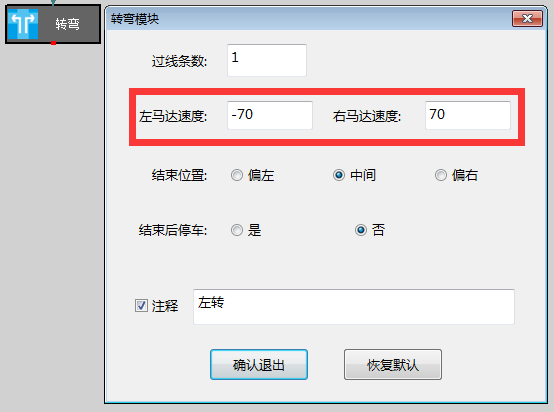
8. 添加转弯模块,设置机器人向左转弯,面向任务位置。
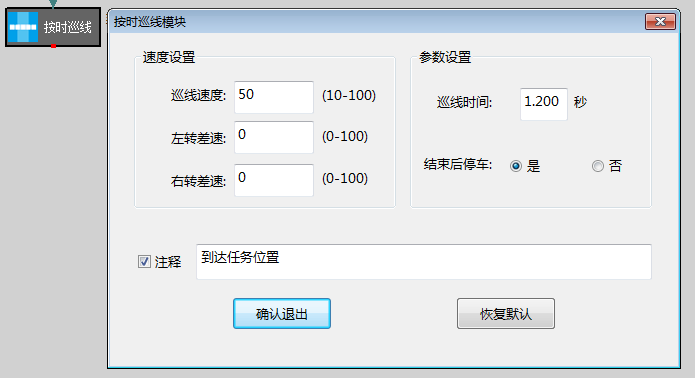
9. 添加按时巡线模块,设置巡线速度为50或者70左右,延时时间为1.2秒,结束后停车,使得机器人跑到任务位置。
10. 添加一个发音模块,代表任务。

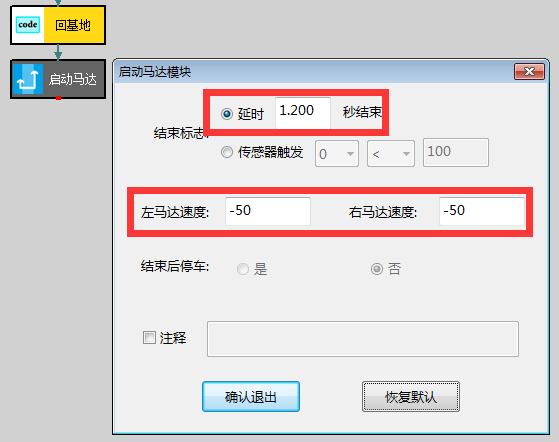
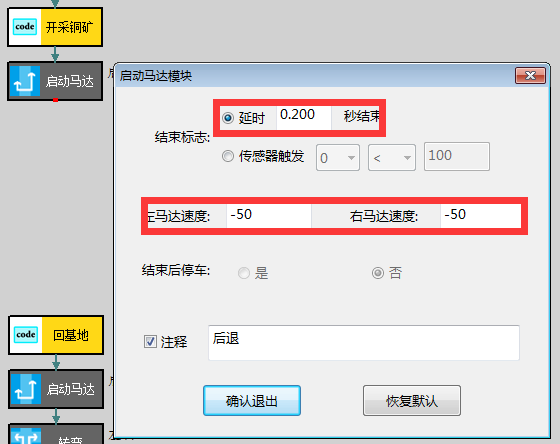
11. 添加启动马达,使机器人后退到路口位置,后退速度与之前到达任务区的按时巡线一致。
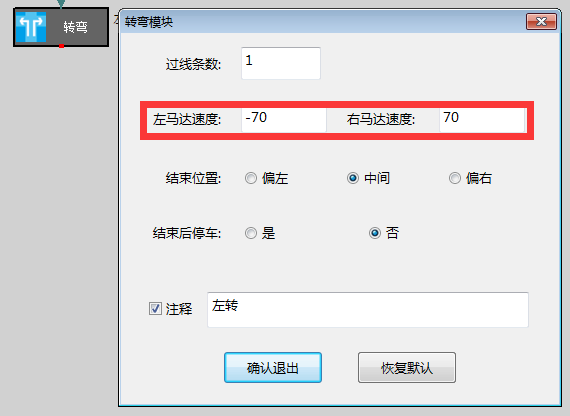
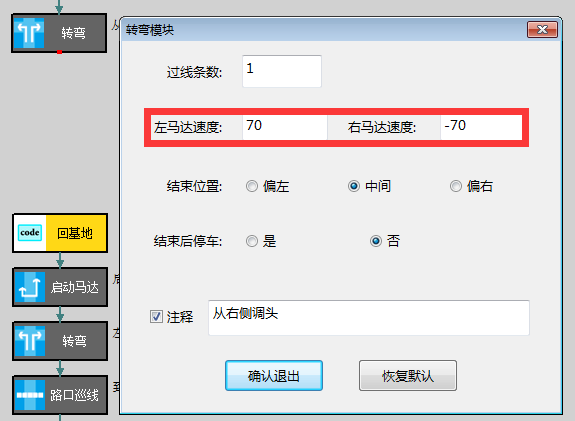
12. 添加转弯模块,设置左右马达速度分别为 -70和70。
13. 添加路口巡线模块,设置左侧路口,循环2次,冲过路口时间为0.2秒,并在结束后停车,使得机器人跑回基地。
三、巡线实践
1. 将上面编写的巡线程序下载到机器人中,操作机器人,观察机器人巡线结果与自己预期是否一致,如果不一致,要思考其中原因。
2. 反复调试相关参数及模块,使得巡线程序成功率达到很高的水平。
四、了解开采铜矿任务
1. 得分规则:机器人将铜矿开采到矿篮内,每块得30分。
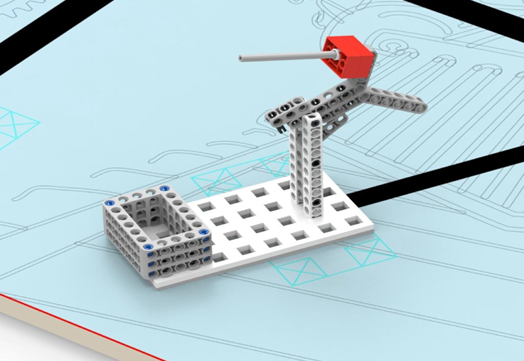
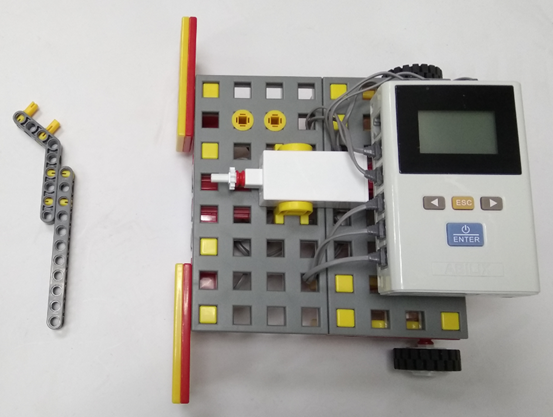
2. 制作任务手臂。
五、编写任务程序
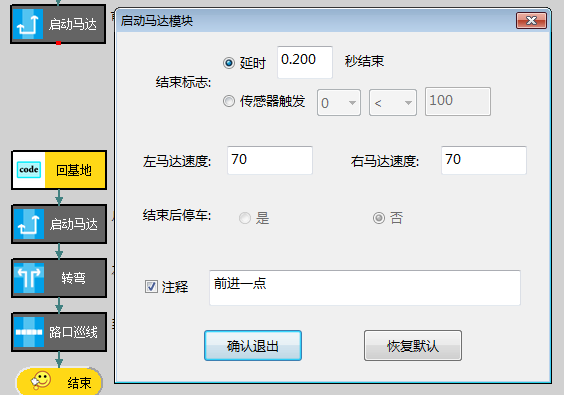
1. 添加启动马达模块,让机器人后退一点点。
2. 添加转弯模块,使得机器人调头。
3. 再让机器人前进一点点。
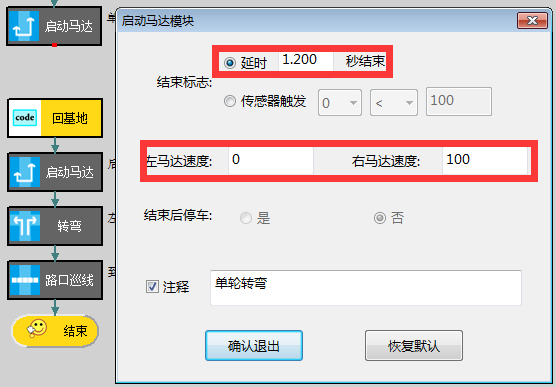
4. 让机器人左马达速度为0,右速度为-100,使得机器人单轮旋转完成任务,再添加一个启动马达,使得左0,右100,使得机器人回到原来样子。

5. 将原先后退回基地的后退模块,改成路口巡线模块,并设置巡左侧路口,然后冲过路口时间为0.2秒。
六、任务实践
1. 将程序下载至机器人控制器中,反复调试程序;
2. 努力提高程序完成任务的成功率。
思考:
如果建造桥梁的任务在这个位置,应该怎么办?
籍山中心小学及城西校区同学使用博文账号登录!