本节课,我们将要学习WER2017能力挑战赛(电教)的建造铁塔任务。本次任务需要接触到两个重要的新知识点,一是舵机的使用,二是弯道巡线规则。
一、了解任务位置及巡线方式

机器人从二楼基地出发,跑到第一个十字路口处,再向前巡弧线弯道,到达弯道大约中间的位置,然后转向铁塔,回基地时,可从右侧顺时针旋转找到弯道弧线,再巡线回基地。
二、了解任务
1. 任务初始状态
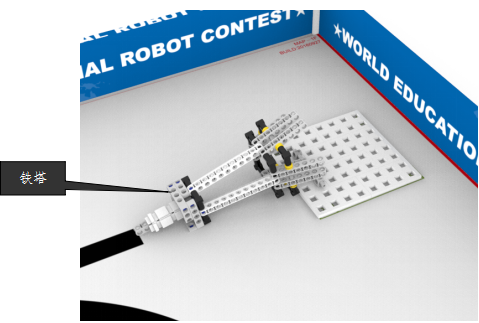
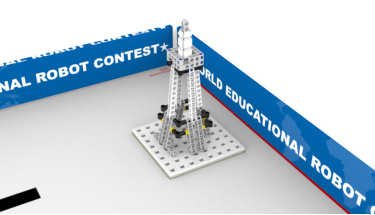
2. 任务完成状态
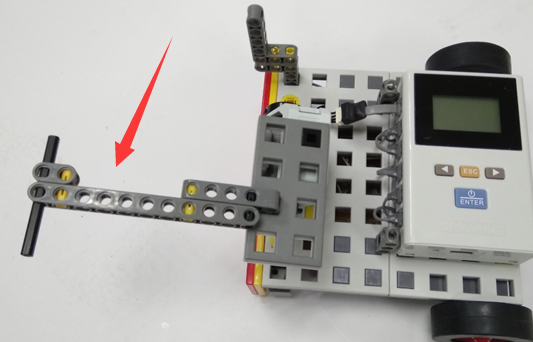
3. 任务手臂
三、编程实践
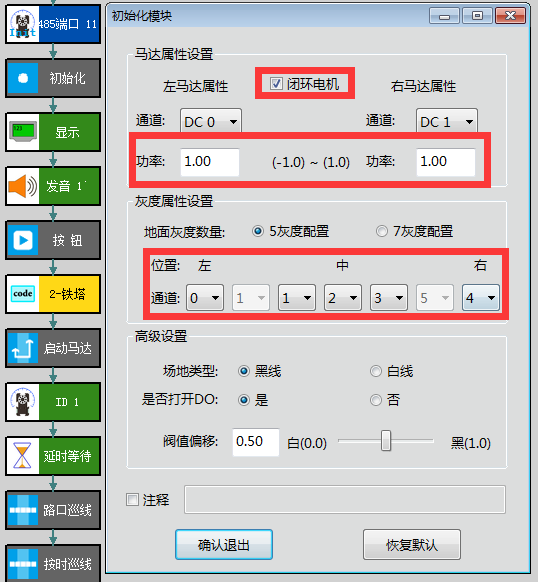
1. 机器人初始化。
(说明:闭环电机初始化需要勾选闭环电机,并且注意右马达的功率不再需要设置成-1。再设置灰度传感器为5度灰,顺序分别为:0、1、2、3、4。本次任务需要使用到舵机,所以在初始化时需要添加数字舵机,并设置舵机初始度数为 -70。)
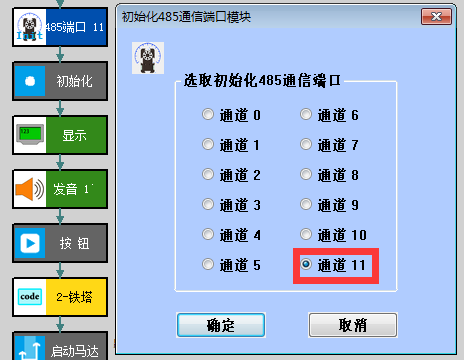
(添加485端口模块,并设置通道为11——舵机按线口)
(添加数字舵机,并设置舵机初始度数为-70度,再在数字舵机后面继续添加一个延时等待,设置等待时间为0.3秒,使机器人调整好舵机。)
(初始化)
程序初始化和舵机初始化后,还要继续添加显示模块,在第三行显示:2-tieta,表示 2楼铁塔任务;再添加发音模块,设置一个短发音,代表所有初始化工作已经完成;再添加一个按钮,使得后面的程序需要通过按钮来执行。
(说明:后面的课程中,涉及到初始化的,都需要添加初始化模块、显示模块、发音模块和按钮模块;涉及到舵机的,都需要添加485端口模块、数字舵机模块及延时模块。)
2.巡线到任务位置。
机器人从二楼基地出发,使用路口巡线检测左侧路口,到达十字路口位置;
(说明:能力挑战赛的地图有二层,每层都有1个基地,可以选择任何一个基地出发。)
使用按时巡线模块,设置巡线速度为100,左轮差速为40,右轮差速为70,巡线时间大约为1.7秒。
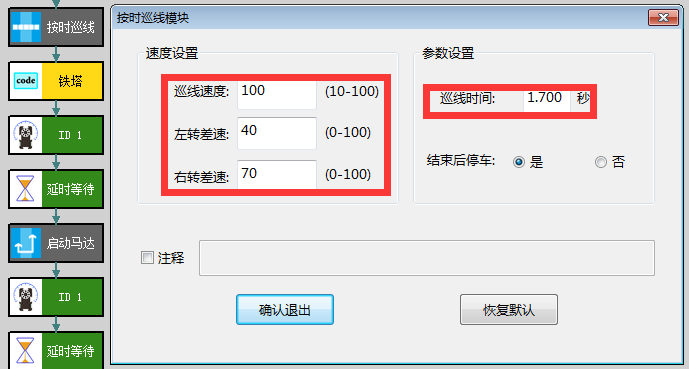
(说明:巡线时,可以使用左右轮差速使机器人巡弧线弯道。左右轮的真实速度计算方法为:巡线速度 - 左右轮差速。如巡线速度为100,左轮差速为40,则左轮实际速度为:100-40=60。)
3. 建造铁塔任务
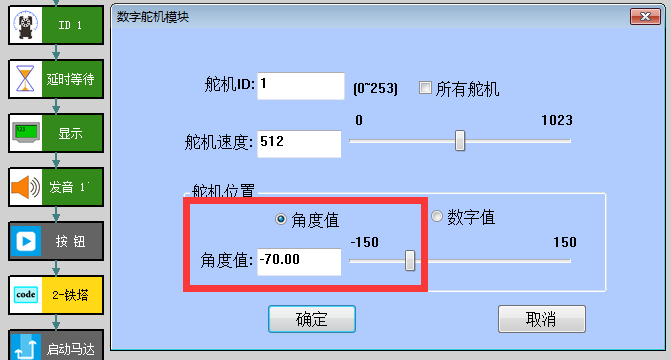
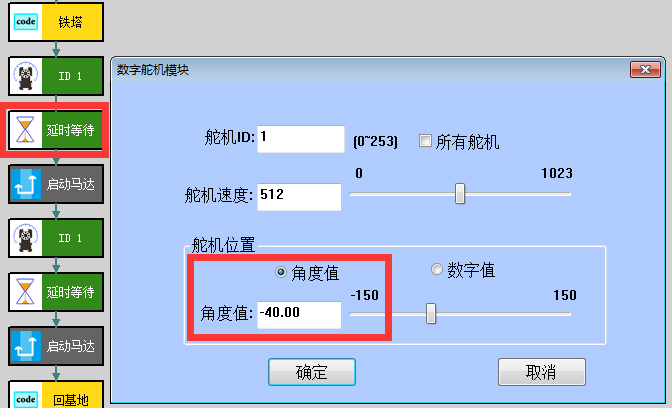
使用数字舵机模块,设置舵机角度为-40,并添加延时模块,设置延时时间为0.3秒,使机器人放下任务手臂。
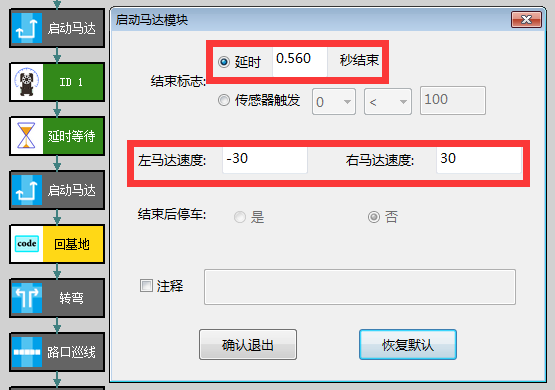
添加启动马达模块,使机器人转向铁塔方向。设置时需要使用时间控制,设置马达延时0.56秒,左马达速度为-30,右马达速度为30。
(说明:此时机器人手臂插入铁塔内部。)
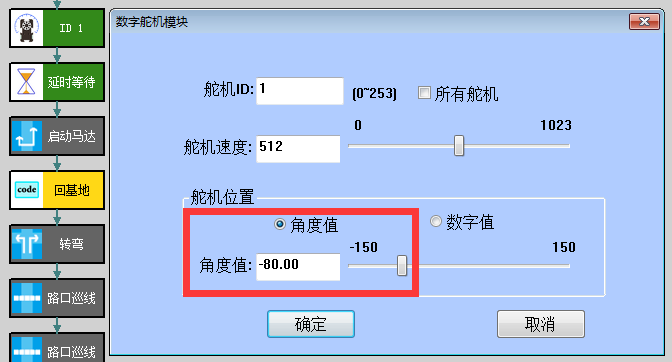
使用舵机模块,使用手臂将铁塔抬起一点。设置数字舵机的角度为-80度,并添加延时模块,设置延时为0.3秒。
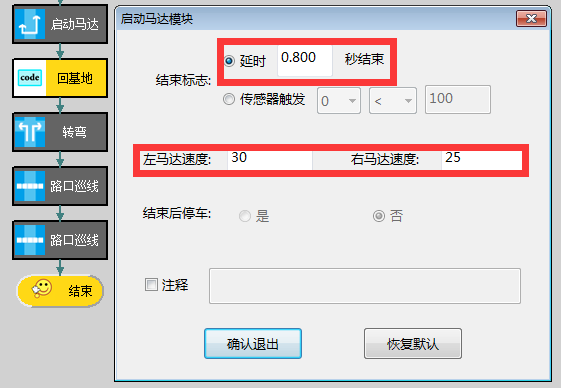
添加启动马达模块,使机器人向前进一些,将铁塔推直立起来。启动马达时间为0.8秒,左马达速度为30,右马达速度为25。
(说明:此时已经完成任务。)
4. 退回基地
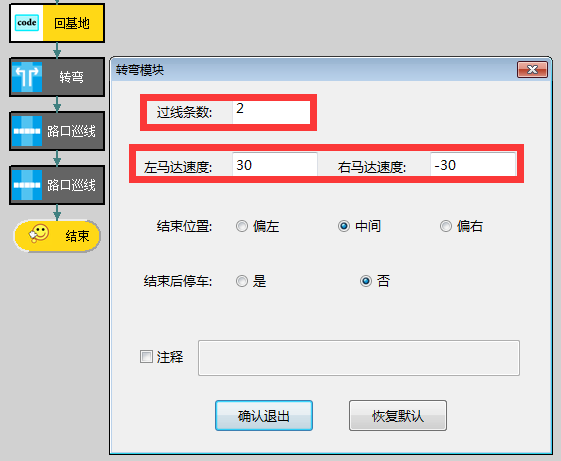
使用转弯模块,设置机器人向右顺势针转弯,并设置过弯条数为2条。
(说明:此时机器人面向基地)
再添加路口巡线巡到路口位置。(注意巡线速度设置为50,速度快了机器人会检测到直道位置。)
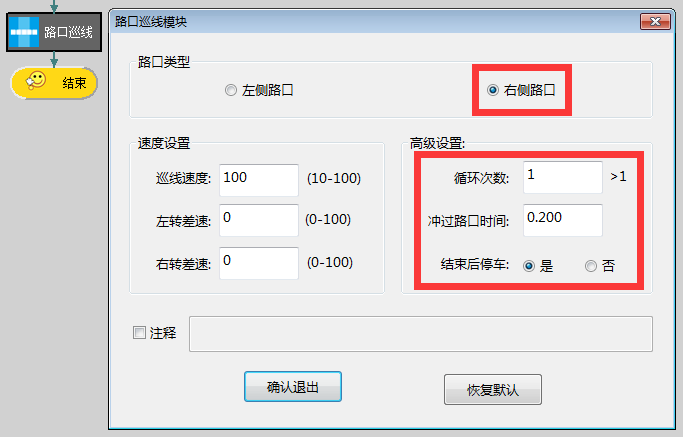
再添加路口巡线,设置路口为右侧路口,冲过路口时间为0.2秒,结束后停车。
(说明:此时机器人跑到基地并停车。)
四、机器人操作实践
1. 将编写好的程度下载到机器人控制器中;
2. 安装上机器人手臂;
3. 反复执行程序,并根据机器人运行结果,对程序进行修改,以提高任务成功率。
籍山中心小学及城西校区同学使用博文账号登录!