本节课,我们将要学习《套环》任务。套环任务需要二个步骤才能完成,所以巡线需要从两个不同路线到达任务位置,然后分别完成不同的任务步骤。
一、了解巡线路线

机器人从二楼基地发现,到达第一个路口,然后向右转弯走路线1到达套环位置;机器人向后转弯,再行驶到路口,然后向右经过弯道到达第二路口位置,再向右转弯走路线2到达任务位置;机器人后退一些,然后转向基地,再直接跑回基地。
二、了解套环任务
1. 任务初始状态
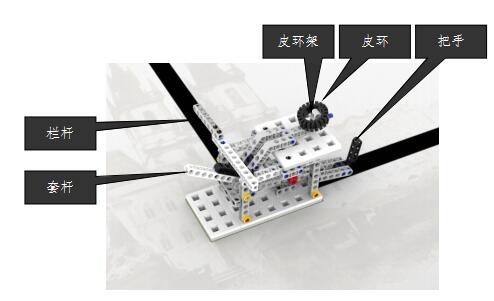
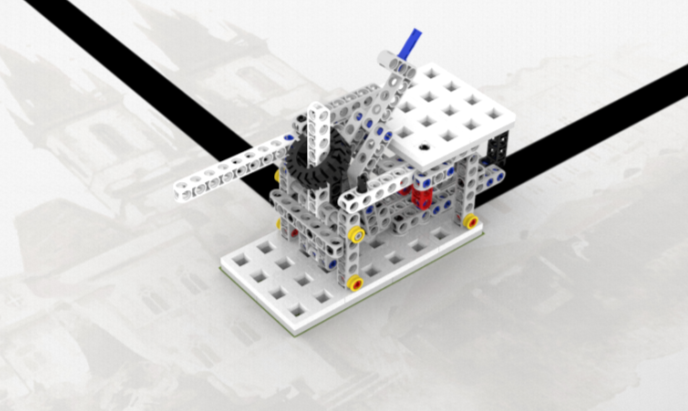
2. 任务完成状态
(说明:首先需要将套环任务上的拉杆打开,然后再推动把手,使皮环脱落或者套上套杆。)
3. 任务手臂
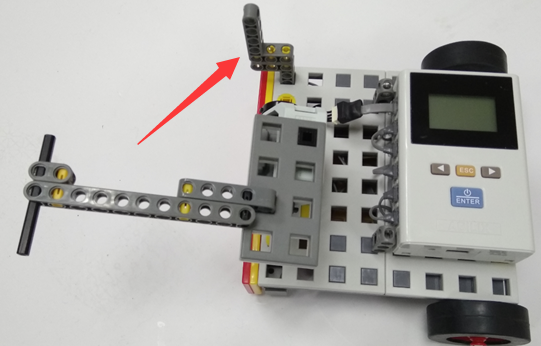
(说明:此图片上,包含建造铁塔任务手臂和套环任务手臂,此处只需要套环任务手臂,所以要将铁塔任务手臂取下。)
三、机器人编程实践
1. 机器人初始化。
(说明:此处初始化不需要使用舵机,其他设置处建造铁塔一样,可参考前一课初始化设置。)
2. 机器人出基地。
添加启动马达,设置左右马达速度为100,结束标志为4号传感器大于1500。
并添加延时模块,设置延时时间为0.2秒,使机器人冲出基地。
3. 巡线路1:
添加路口巡线模块,设置巡左侧路口,并设置冲过路口时间为0.1秒,使机器人到达第一个路口,并冲过路口一点点。
添加转弯模块,设置左马达速度为30,右马达速度为-30,使机器人向右转弯,转弯线路1。
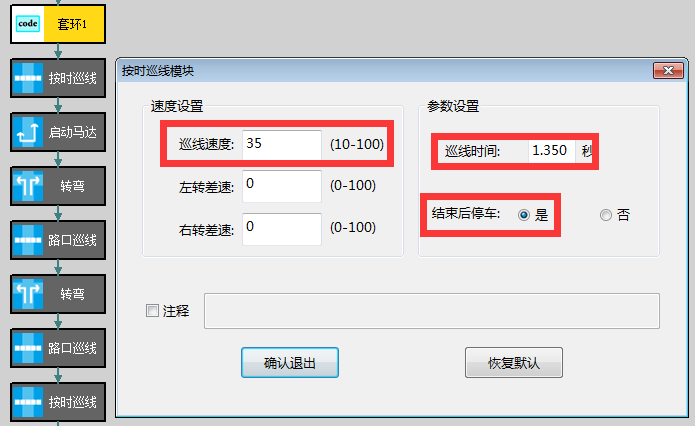
添加按时巡线模块,设置巡线速度为35,巡线时间为1.35秒,结束后停车。
(说明:此时机器人跑到套环任务位置。)
4. 打开栏杆。
添加启动马达模块,设置左右马达都为-30,延时时间为0.15秒。
(说明:使机器人后退一点点,为打开栏杆留一点空隙)
添加转弯模块,设置左马达为-100,右马达为100,使机器人快速从左侧逆时针转弯掉头。
(说明:快速转弯的同时,机器人上的手臂会刚好把栏杆打开。)
5. 巡路线2。
添加路口巡线模块,设置机器人巡左侧路口,并冲过路口时间为0.1秒。
(说明:使机器人跑到第一个路口位置。)
添加转弯模块,设置左马达速度为30,右马达速度为-30,使机器人向右转弯。
添加路口巡线模块,设置巡线速度为100,左轮差速为40,右轮差速为70,冲过路口时间为0。
(说明:此处弯道巡线与建造铁塔任务一样。注意此处冲过路口时间需要设置为0.)
再添加按时巡线模块,设置巡线速度为30,巡线时间为0.6秒,结束后停车。
(说明:此处的按时巡线是使得机器人向前再前进一点,代替之前的冲过路口时间。至于为什么需要这么设置,同学们可在程序中修改,观察机器人跑动结果。)
添加转弯模块,设置左马达速度为30,右马达速度为-30,使机器人转到线路2。
6. 推开把手。
添加启动马达模块,设置左右马达速度都为80,时间为0.7秒,结束后停车。
(说明:使机器人冲向套环任务,通过撞击把手,将皮环撞脱落或撞上套杆。)
7. 回基地。
添加启动马达模块,设置左右马达为-30,时间为0.6秒。
(说明:使机器人后退一些。)
添加启动马达模块,设置左马达为-30,右马达为-30,时间为0.4秒。
(说明:使机器人转向基地。)
添加启动马达模块,设置左马达速度为85,右马达速度为100,时间为2.5秒。
(说明:使机器人跑到基地)
四、机器人操作实践
1. 将编写的程序下载到机器人控制器中;
2. 安装好任务手臂;
3. 反复执行程序,观察机器人跑动结果,根据结果修改程序,以提高任务完成的成功率。
五、拓展
为了节省机器人完成任务的时间,通常我们可以将同一条线路上任务安排一次性完成。这需要将两个任务进行合并,合并后的程序会很长,需要同学们特别的细心、用心,并不惧怕失败,相信,你会成功。
本次拓展任务,是将《建造铁塔》和《套环》任务进行合并,具体完成方式,请看本课程中的微课视频。
籍山中心小学及城西校区同学使用博文账号登录!