学习目标
1. 学习平移货物的任务完成方式;
2. 学习安装灯泡任务完成方式;
本节课将要学习最后两个任务:《平移货物》和《安装灯泡》。平移货物任务相对比较简单,安装灯泡任务并不难,但是由于重量及磁铁等原因,完成任务的成功率并不会太高。
一、了解巡线规则
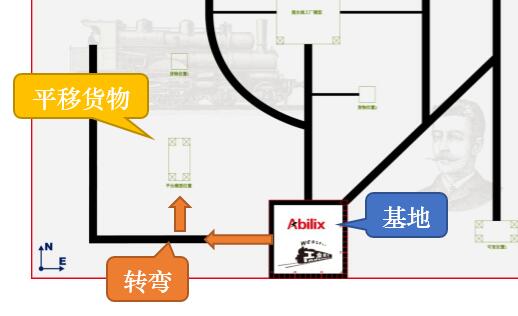
1. 平移货物: 机器人向左侧出发,到达大约模型的位置,然后转弯面向模型,再前进到模型位置。回基地:后退、转向、跑向基地。

2. 安装灯泡:机器人从右侧斜线出发,到达第一个路口左转,然后使用路口巡线,巡到粗线位置(丁字路口),再后退一点,到达任务位置。回基地:直接使用差速后退回基地。
二、了解任务规则
1. 平移货物
平移货物时需要保证货物仍然在平台上
2. 安装灯泡
灯泡需要挂在地图框架的横栏上,并保持到结束。
三、编程实践
1. 平移货物
机器人调整舵机角度,从左侧出基地,以70的速度前进约1秒左右;
再使用启动马达,设置左30,右-30,时间约0.85秒,使机器人转向模型;
使用启动马达,使机器人前进约0.5秒,使机器人跑到模型位置。
舵机角度减小,使手臂放下一点,勾住平台的横栏;
机器人后退0.3秒,拉起平台;(速度不能快)
机器人抬起舵机,并转向,再跑回基地。
2. 安装灯泡
机器人调整舵机角度,从右侧斜线出发基,到达第一个路口后向左转弯;
使用路口巡线,巡左侧路口,到达丁字路口处;
使用启动马达,使机器人后退约0.3秒。
抬起舵机(速度慢),并适当增加延时时间,使灯泡吸在横梁上。
机器人慢慢后退,保证不影响灯泡的稳定性。
再使用差速退回基地,左轮-60,右轮-80的速度,时间约1.5秒左右。
四、操作实践
1. 将程序下载到控制器中;
2. 安装手臂,执行程序;
3. 根据程序执行结果,不断修改参数,以保证程序完成任务的成功率。
籍山中心小学及城西校区同学使用博文账号登录!