本节课我们将要学习综合任务《流水线加工》,流水线加工一共有四个任务组成,分别是获取矿石、投放矿石、矿石加工和清理垃圾。
一、了解流水线任务巡线规则
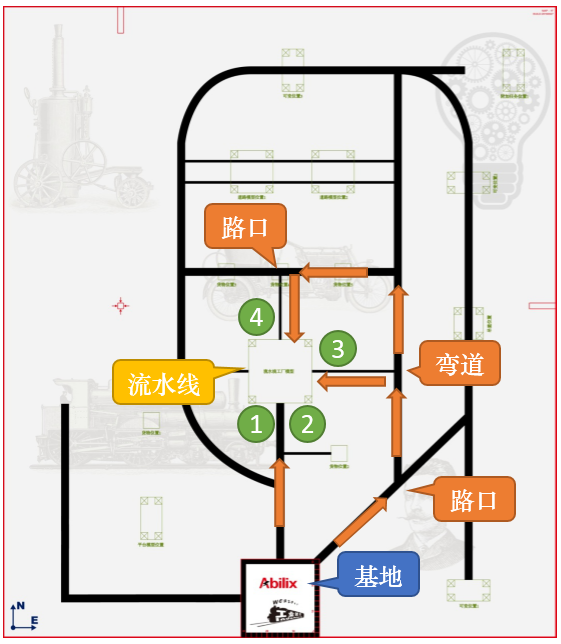
注:1-获取矿石任务,2-投放矿石任务,3-矿石加工任务,4-清理垃圾任务。
1号、2号任务是在同一个位置,所以巡线方式一样,回基地方式也一样,需要注意确定位置时,需要借助旁边的细线,而细线需要使用环境采集获取。
3号任务位置也是细线,需要注意细线位置不能使用转弯和巡线模块。
4号任务最后到达任务位置处,也是细线。
二、了解流水线任务
1. 获取矿石任务
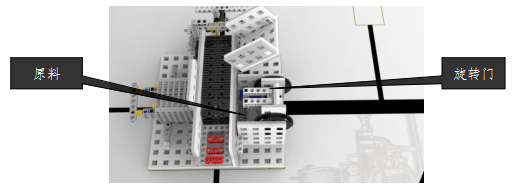

(说明:使用手臂打开旋转门,将矿石从流水线中取出则完成任务。)
2. 投放矿石任务

(说明:将任务1中获取的矿石通过投放通道放到传送带中,任务完成。)
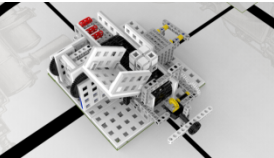
3. 加工矿石任务
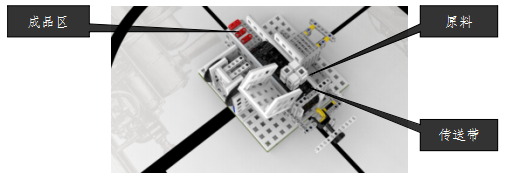
(说明:机器人转动手柄,使传动带传动起来,并将任务2中投放的矿石带到成品区位置,完成任务。)
4. 清理垃圾任务
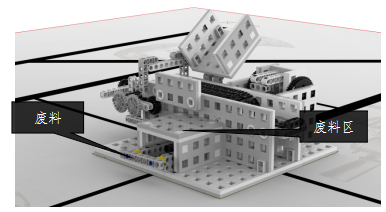
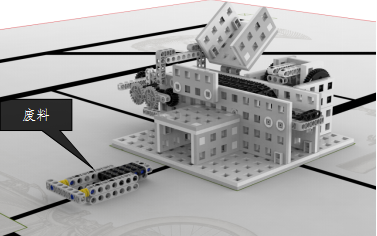
(说明:机器人将废料从废料区中取出,完成任务。)
三、编程实践
1. 获取矿石任务
获取矿石任务的手臂分为两个部分,一个是接舵机上的手臂,用于撞开旋转门,二个是下方的小框子,用于带回矿石。
机器人首先调整舵机角度,使手臂朝正前方位置,刚好能撞击到旋转门的角度,然后从基地出发,用40的速度一直前进,然后检测到右侧细线(用4号传感器,灰度值为800检测),再按时前进约0.4秒到达任务位置,然后抬起舵机,再迅速放下舵机,反复两次,使手臂砸开旋转门(如果开始没有撞开旋转门,砸两下也可以打开)。机器人使用启动马达以100的速度后退约1.2秒回到基地。
2. 投放矿石
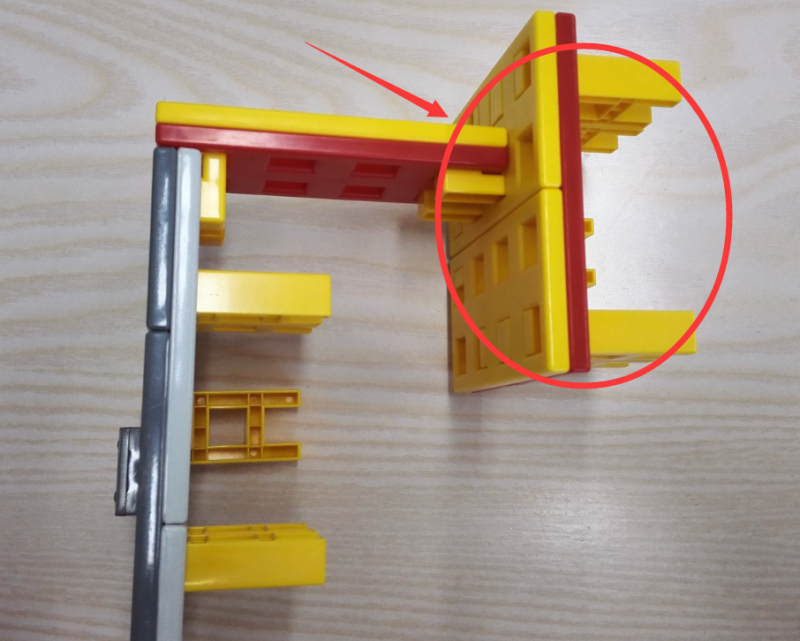
投放矿石手臂与后面的吊篮手臂是同一个,只是矿石摆放位置不同,投放矿石任务需要将任务1获取矿石中的矿石放入手臂上面的框架。
机器人将矿石装载好后,出基地以40的速度前进,直到检测到右侧细黑线(与任务1相同),再使用按时巡线前进约0.2秒,然后舵机放下一定角度,使得矿石投放到入口处。机器人再后退回到基地。
3. 加工矿石
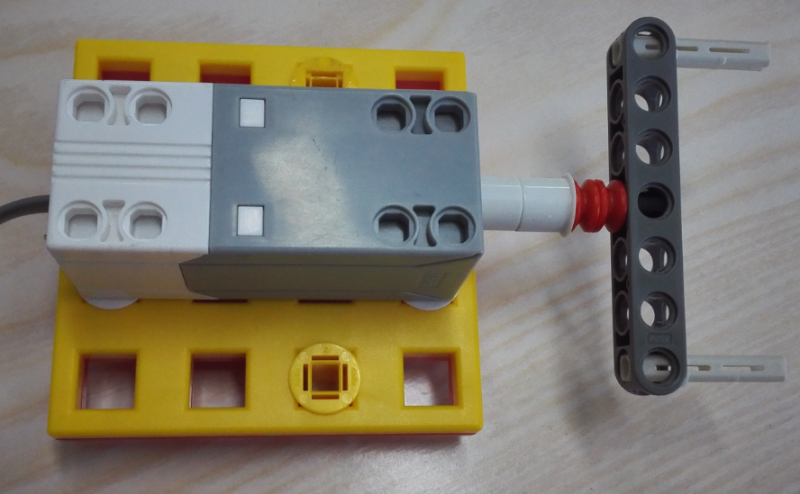
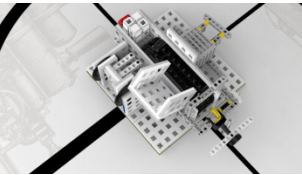
加工矿石使用电机完成任务,电机手臂如图式样。电机接最后一个电机接口,电机接在机器人正前方,接电机时,要拆下舵机。
机器人从右侧斜线出发,到达第一个路口左转,前进到第一条细黑线处(使用0号传感器,检测灰度值800),然后使用启动马达转弯(不能使用转弯模块),设置值大约为左马达-30,右马达30,时间约为0.85秒,转弯成功后,再前进一点点,使机器人触碰到任务模型,再后退约0.1秒,便手臂与任务模型留有一点空隙,再转动马达大约2秒,使得任务完成。最后机器人后退,再转弯巡线回基地。
4. 清理垃圾
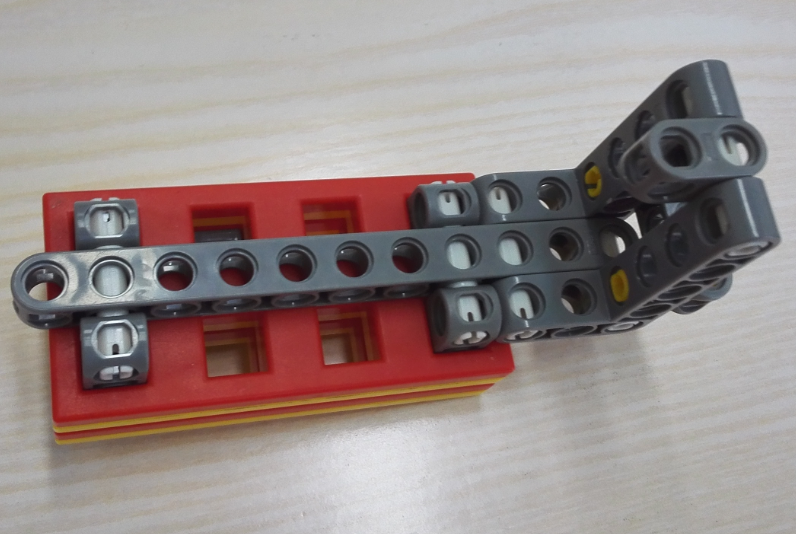
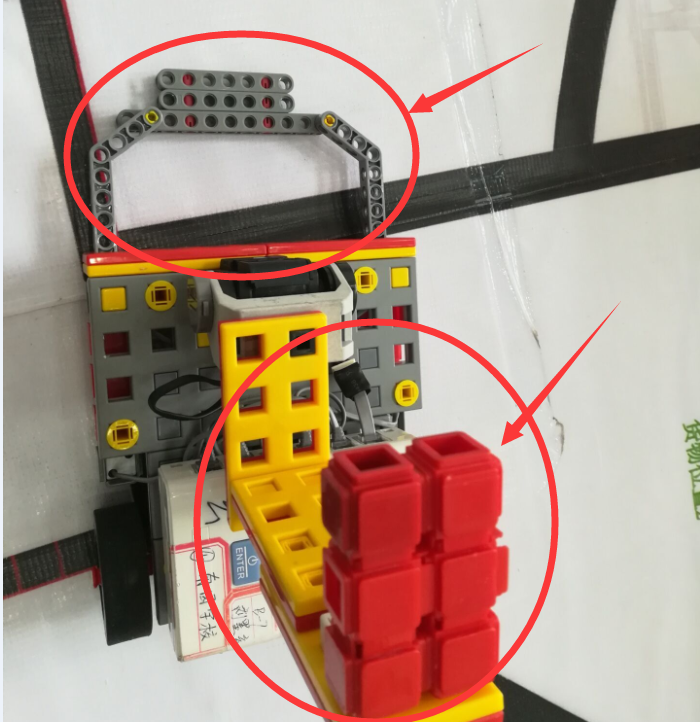
清理垃圾需要使用舵机,手臂如图式样。
机器材人初始舵机大约是10度。机器人从右侧斜线出发,到达第一个路口左转,然后使用路口巡线检测到左侧第一条粗线(路口巡线无法检测到细线),转弯后再前进到细线位置(需要使用0号传感器,检测灰度值为800),然后使用启动马达转弯,转弯后前进到任务位置,再抬起舵机(大约抬到-10度),然后机器人后退抽出垃圾,然后再巡线回到基地。
四、操作实践
1. 将编写的程序下载到机器人控制器中;
2. 安装手臂,操作机器人完成任务;
3. 不断调试手臂、舵机角度、程序参数,以提高程序完成任务的成功率。
籍山中心小学及城西校区同学使用博文账号登录!