本节课,我们将要学习三个任务,这三个任务是逐个完成并串联起来的。首先需要在第一个任务《开采矿石》中将矿石获取到,然后在第二个任务《吊篮》中完成投放,即将矿石放入吊篮里,再到第三个任务《升降机》中,将升降机升到二层平台齐平的位置。
一、了解任务巡线规则

1号位置是开采矿石任务,机器人从斜线出发,到达第二个路口位置,向下(向右)转弯,再前进到此。回基地可以巡线,也可以转向基地后直接回到基地。
2号位置是吊篮任务,机器人从斜线出发,到达第二个路口位置后,向上(向左)转弯,再前进到达任务位置,回基地可以直接用差速退回,也可以巡线回基地。

3号位置是升降机任务,机器人从二楼出发,经过弯道,再冲过路口,达到任务位置,完成任务后,巡线回到基地。
二、了解任务规则
1. 开采矿石
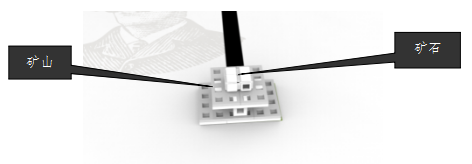
机器人获取矿石后,将矿石带回基地。
2. 吊篮
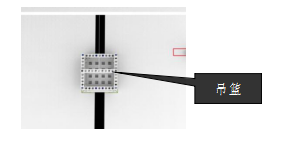
将上个任务开采到的矿石投放到吊篮中。
3. 升降机
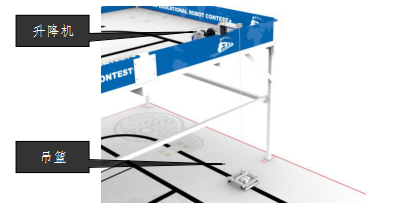
将装载矿石的吊篮上升到如下图的位置。

三、编程实践
1. 开采矿石

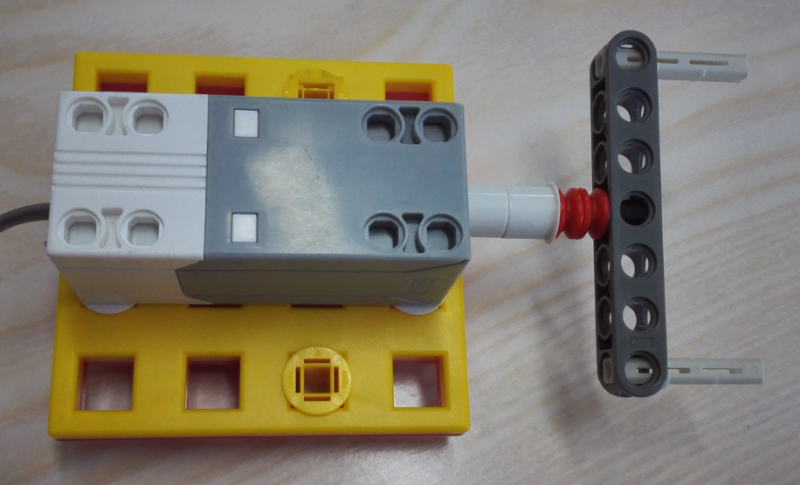
开采矿石手臂如图式样,另外还需要在机器人前方安装框架,框架如《流水线综合任务》中的获取矿石式样。
初始化时,将手臂调整到上方的位置,当机器人到达任务位置后,后退一点点,然后舵机放下一点,使手臂利用惯性将矿石勾回到框架中,然后机器人带着矿石退回到基地。
2. 吊篮
吊篮任务手臂与投放矿石手臂一致,只是矿石需要装在下方位置。
机器人到达任务位置后,转动舵机,使矿石掉入吊篮中,机器人再退回基地。
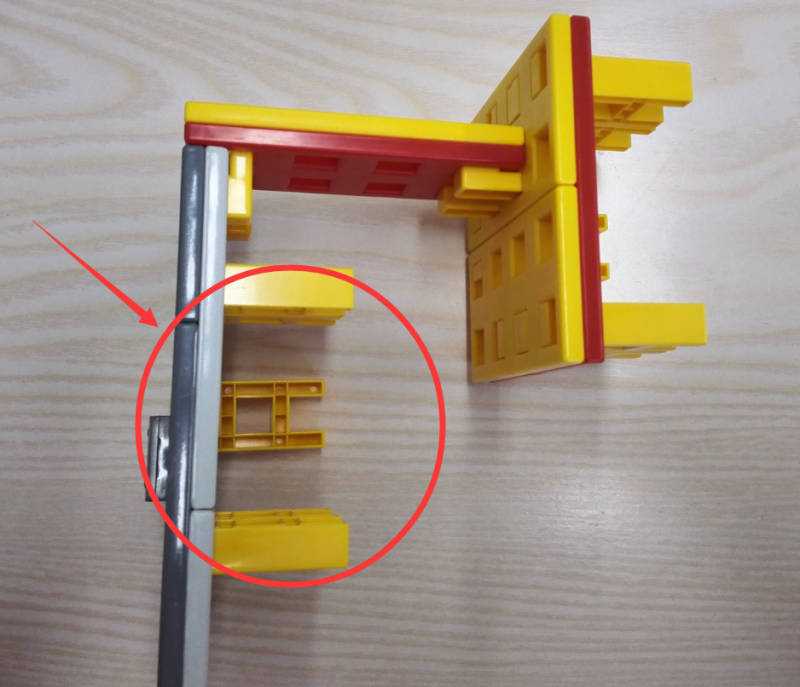
3. 升降机
升降机手臂与流水线中的第三个任务一致。
机器人到达任务位置后,需要转动马达,一般情况下,没有矿石的吊篮大约12秒左右可到达二层平台的高度,装载了矿石的吊篮大约16秒左右到达二层平台。
四、操作实践
1. 编写好程序后,将程序下载到机器人控制器中;
2. 安装手臂,操作机器人完成任务;
3. 不断修改手臂和程序,以提高完成任务的成功率。
说明:任务难度较大,需要同学们不断尝试,在失败中总结经验,在失败中寻找成功的方法。
籍山中心小学及城西校区同学使用博文账号登录!